ブロックテストとシミュレータ
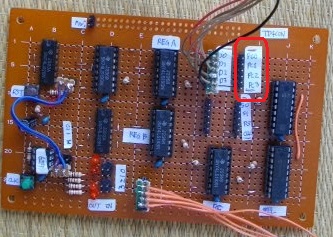
基板に部品を半田付けしながら、ブロックごとに動作を テストしました。そのプロセスを備忘録として残します。 測定機器としてアナログとデジタルのマルチメータを使います。 デジタルマルチメータには、周波数カウンタがあるので クロックジェネレータの出力周波数を確認するのに利用 しました。アナログマルチメータは、プログラムカウンタの出力を 測定するのと、クロックジェネレータの出力を針の動き で見るのに使います。
他にArduino基板を1枚使いました。
プログラムカウンタや入力に与える信号を生成します。
電源
モニタLEDがあるので、電池を接続し点灯を確認しました。電池を接続して、2枚の基板を6ピンで接続すると、各基板 上のLEDが点灯します。
リセット
タクトスイッチを利用して、nRST、RSTの電圧レベルを 確認しました。 出力回路にLEDがあるので、リセット時にLEDが消灯する ことで動作確認できたとしました。この動作テストに利用したプログラムは、以下。 0 MOV B,15 1 OUT B 2 JMP 1 常に出力に2進数で"1111"を出力するので LEDが点灯し続けます。リセットで、全部 のレジスタをクリアするので、LED消灯に なります。
クロックジェネレータ
マルチメータが周波数カウンタを持っているので 周波数カウンタモードにして周波数を測定しました。 10Hzクロック1Hzクロック
レジスタファイル
レジスタAからCは、入力4ビットのうちの1ビットを0V に接続し、ロード端子に'L'を与えて値を記憶させます。 マルチメータを電圧モードにし、4ビットの出力電圧を 測定して、動作を確認しました。レジスタDは、PC(Program Counter)になっているので クロック端子に、クロックジェネレータからクロック を与え、各出力ビットが0と1を繰り返すことをアナログ マルチメータで観測します。
出力回路
次のプログラムをROMエミュレータに転送し、1Hzのクロックを 与えてLEDの点灯パターンで確認しました。 0 MOV A,0 1 MOV B,A 2 OUT B 3 ADD A,1 4 JMP 1 レジスタAをカウンタで使い、0から15までカウントするので 4ビットの出力でLEDの点灯パターンが変わっていきます。
入力回路
次のプログラムをROMエミュレータに転送し、10Hzのクロックを 与えて、LEDの点灯パターンで確認しました。 0 IN A 1 MOV B,A 2 OUT B 3 JMP 0 4ピンにクリップワイヤーで、HかLレベルを与えました。
セレクタ
テストクリップを用意し、マイコンに制御信号とデータを与えます。制御信号とデータは、Arduinoから与えます。 スケッチは以下。 #include <MsTimer2.h> #define OFF 0 #define ON OFF+1 #define LED_BIT 5 /* function prototype */ void rs_putchar(char x); void rs_puts(char *x); void crlf(); void show_help(); void update_trigger(); byte get_hex(char x); /* global variables */ byte xcnt ; byte uflag ; byte sindex ; byte sbuf[8] ; byte cmd ; byte xadr ; byte xdat ; void setup() { /* initialize serial port */ Serial.begin(9600); sindex = 0 ; /* set initial state */ PORTB = 0x00 ; PORTC = 0x00 ; PORTD = 0x01 ; /* set pin directions */ DDRB = 0xff ; DDRC = 0xff ; DDRD = 0xfe ; /* clear flags */ uflag = OFF ; /* initialize */ xcnt = 0 ; /* 200ms period */ MsTimer2::set(200,update_trigger); /* enable */ MsTimer2::start(); } void loop() { /* serial handling */ if ( uflag == ON ) { /* clear flag */ uflag = OFF ; /* new line */ crlf(); /* get command */ cmd = *(sbuf+0) ; /* judge */ if ( cmd == '?' ) { show_help(); } /* impress */ if ( cmd == 'P' ) { /* get selector */ xadr = get_hex( *(sbuf+1) ) ; /* get data */ xdat = get_hex( *(sbuf+2) ) ; /* impress selector */ PORTB &= 0xf0 ; PORTB |= (xadr & 0x03); /* impress data */ PORTC = (xdat & 0x0f) ; } } } void rs_putchar(char x) { Serial.write(x); } void rs_puts(char *x) { while ( *x ) { rs_putchar(*x); x++ ; } } void crlf(void) { rs_putchar('\r'); rs_putchar('\n'); } void show_help(void) { rs_puts("? help"); crlf(); rs_puts("P impress data"); crlf(); } void update_trigger() { PORTB &= ~(1 << LED_BIT); if ( xcnt & ON ) { PORTB |= (1 << LED_BIT); } xcnt++ ; } byte get_hex(char x) { byte result ; result = 0 ; if ( '0' <= x && x <= '9' ) { result = x - '0' ; } if ( 'A' <= x && x <= 'F' ) { result = x - 'A' + 10 ; } if ( 'a' <= x && x <= 'f' ) { result = x - 'a' + 10 ; } return result ; } /* receive interrupt */ void serialEvent() { char ch ; if ( Serial.available() > 0 ) { /* get 1 character */ ch = Serial.read(); /* store */ *(sbuf+sindex) = ch ; /* increment */ sindex++ ; /* judge */ if ( ch == '\r' ) { sindex = 0 ; uflag = ON ; } } } データセレクタをテストするコマンドは、'P'のみです。 コマンド1文字に続けて、0から3でどのビット選択するかを 指定します。次にデータを0から9、AからFの16進数で指定 します。
命令デコーダ
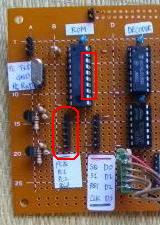
命令デコーダは、レジスタファイルのロード信号を 生成する回路になります。 ROMの4ビット出力を、74LS139、74HC10で信号を生成 するので、ROMエミュレータからアドレスを出力して 74LS139、74HC10の出力信号を確認します。信号はアナログマルチメータで、電圧を測定して 確認します。
ALU
ALUは、加算処理だけなので、4ビットのデータを 2つ用意します。 Arduinoのスケッチでテストしました。 #include <MsTimer2.h> #define OFF 0 #define ON OFF+1 #define LED_BIT 5 /* function prototype */ void rs_putchar(char x); void rs_puts(char *x); void crlf(); void show_help(); void update_trigger(); byte get_hex(char x); /* global variables */ byte xcnt ; byte uflag ; byte sindex ; byte sbuf[8] ; byte cmd ; byte xadr ; byte xdat ; void setup() { /* initialize serial port */ Serial.begin(9600); sindex = 0 ; /* set initial state */ PORTB = 0x00 ; PORTC = 0x00 ; PORTD = 0x01 ; /* set pin directions */ DDRB = 0xff ; DDRC = 0xff ; DDRD = 0xfe ; /* clear flags */ uflag = OFF ; /* initialize */ xcnt = 0 ; /* 200ms period */ MsTimer2::set(200,update_trigger); /* enable */ MsTimer2::start(); } void loop() { /* serial handling */ if ( uflag == ON ) { /* clear flag */ uflag = OFF ; /* new line */ crlf(); /* get command */ cmd = *(sbuf+0) ; /* judge */ if ( cmd == '?' ) { show_help(); } /* adder */ if ( cmd == 'A' ) { /* get data A */ xadr = get_hex( *(sbuf+1) ) ; /* get data B */ xdat = get_hex( *(sbuf+2) ) ; /* impress data A */ PORTB &= 0xf0 ; PORTB |= (xadr & 0x0f); /* impress data B */ PORTC = (xdat & 0x0f) ; } /* selector */ if ( cmd == 'P' ) { /* get selector */ xadr = get_hex( *(sbuf+1) ) ; /* get data */ xdat = get_hex( *(sbuf+2) ) ; /* impress selector */ PORTB &= 0xf0 ; PORTB |= (xadr & 0x03); /* impress data */ PORTC = (xdat & 0x0f) ; } } } void rs_putchar(char x) { Serial.write(x); } void rs_puts(char *x) { while ( *x ) { rs_putchar(*x); x++ ; } } void crlf(void) { rs_putchar('\r'); rs_putchar('\n'); } void show_help(void) { rs_puts("? help"); crlf(); rs_puts("A add "); crlf(); rs_puts("P impress data"); crlf(); } void update_trigger() { PORTB &= ~(1 << LED_BIT); if ( xcnt & ON ) { PORTB |= (1 << LED_BIT); } xcnt++ ; } byte get_hex(char x) { byte result ; result = 0 ; if ( '0' <= x && x <= '9' ) { result = x - '0' ; } if ( 'A' <= x && x <= 'F' ) { result = x - 'A' + 10 ; } if ( 'a' <= x && x <= 'f' ) { result = x - 'a' + 10 ; } return result ; } /* receive interrupt */ void serialEvent() { char ch ; if ( Serial.available() > 0 ) { /* get 1 character */ ch = Serial.read(); /* store */ *(sbuf+sindex) = ch ; /* increment */ sindex++ ; /* judge */ if ( ch == '\r' ) { sindex = 0 ; uflag = ON ; } } } ポートB、Cを使い、ワイヤーでArduinoと74LS181を接続し 加算結果とキャリーをマルチメータの電圧モードで確認して います。
ROMエミュレータ
ROMエミュレータは、PersonalComputerとATtiny2313を 接続し、端末ソフトのTeraTermでコマンドを与えてEEPROM の中にデータを格納し、それを表示させました。 シリアルインタフェースで、EEPROMの内容を確認すると以下。機械語の入力で、逆アセンブルできます。
全体は、次のように変化します。
さらに、PCの値(4bit)を与えて出力値を確認しました。
シミュレータ
Tcl/Tkで記述したシミュレータのソースコードは、以下。 #!/usr/local/bin/wish wm title . "TD4 simulator" set theFileName "" set fd_in "" set pgm(0) "" set pgmcode "" set xpc 0 set rega 0 set regb 0 set xcarry 0 set inxval 0 set outxval 0 set decodexval "" ####################################### # define objects ####################################### #label label .lblFileNameLabel -text "FileName" label .lblFileName -textvariable theFileName label .lblPC -text "PC" label .lblCode -text "code" label .lblRegA -text "regA" label .lblRegB -text "regB" label .lblCarry -text "carry" label .lblIN -text "IN" label .lblOUT -text "OUT" label .lblDecode -text "decode" label .lblIndexV -textvariable xpc label .lblCodeV -textvariable pgmcode label .lblRegAV -textvariable rega label .lblRegBV -textvariable regb label .lblCarryV -textvariable xcarry label .lblINV -textvariable inxval label .lblOUTV -textvariable outxval label .lblDecodeV -textvariable decodexval #entry box entry .txtINV -textvariable inxval #list box listbox .lstAsmcode -yscrollcommand ".scbLadderV set" listbox .lstBCode -yscrollcommand ".scbLCodeV set" #scroll bar scrollbar .scbLadderV -orient vertical -command ".lstAsmcode yview" scrollbar .scbLCodeV -orient vertical -command ".lstBCode yview" # button button .btnExit -text "Exit" -command "exit" button .btnLoad -text "Load" -command { # set theFileName [tk_getOpenFile -filetypes {{"assembly code file" {.asm}}}] # clear list box .lstAsmcode delete 0 end .lstBCode delete 0 end # open set fd_in [open $theFileName "r"] # read context set i 0 while { [gets $fd_in sbuf] >= 0 } { # store set pgm($i) [string tolower $sbuf] # display #set tmp [format " %s" $pgm($i)] set tmp [format " %s" [string tolower $pgm($i)]] .lstAsmcode insert end $tmp # display .lstBCode insert end " 0x[getCode $pgm($i)] : [string tolower $pgm($i)]" # increment incr i } set last $i # close close $fd_in # initialize set xpc 0 set rega 0 set regb 0 set xcarry 0 set inxval 0 set outxval 0 # first code set pgmcode $pgm($xpc) # set first code decode doDecode [getCode $pgm($xpc)] } button .btnRst -text "Reset" -command { set xpc 0 set rega 0 set regb 0 set xcarry 0 set outxval 0 set pgmcode $pgm($xpc) # set code decode doDecode [getCode $pgm($xpc)] } button .btnStep -text "Step" -command { doScan } ####################################### # procedures ####################################### proc doDecode {x} { global decodexval # get instruction set car [string index $x 0] set tmp "" # MOV A,Im if { $car == "3" } { set tmp "dst(register A) src(ROM lower nibble)" } # MOV A,B if { $car == "1" } { set tmp "dst(register A) src(register B)" } # ADD A,Im if { $car == "0" } { set tmp "dst(register A) src(ALU output)" } # IN A if { $car == "2" } { set tmp "dst(register A) src(input)" } # MOV B,Im if { $car == "7" } { set tmp "dst(register B) src(ROM lower nibble)" } # MOV B,A if { $car == "4" } { set tmp "dst(register B) src(register A)" } # ADD B,Im if { $car == "5" } { set tmp "dst(register B) src(ALU output)" } # OUT Im if { $car == "b" } { set tmp "dst(output = register C) src(ROM lower nibble)" } # OUT B if { $car == "9" } { set tmp "dst(output = register C) src(register B)" } # IN B if { $car == "6" } { set tmp "dst(register B) src(input)" } # JMP if { $car == "F" } { set tmp "dst(PC = register D) src(ROM lower nibble)" } # JNC Im if { $car == "E" } { set tmp "dst(PC = register D) src(ROM lower nibble) no carry" } # update set decodexval $tmp } proc doScan {} { global pgm pgmcode xpc rega regb xcarry inxval outxval # get instrcution set code [string tolower $pgm($xpc)] set pgmcode $code set opcode [lindex $code 0] set oprandx [split [lindex $code end] ","] # add if { $opcode == "add" } { set xcarry 0 set tmpx [lindex $oprandx 0] set tmpy [lindex $oprandx end] if { $tmpx == "a" } { set result [expr $rega + $tmpy] set rega [expr $result % 16] if { $result > 15 } { set xcarry 1 } } if { $tmpx == "b" } { set result [expr $regb + $tmpy] set regb [expr $result % 16] if { $result > 15 } { set xcarry 1 } } } # mov if { $opcode == "mov" } { set xcarry 0 set tmpx [lindex $oprandx 0] set tmpy [lindex $oprandx end] if { $tmpx == "a" } { set result $tmpy if { $tmpy == "b" } { set result $regb } set rega $result } if { $tmpx == "b" } { set result $tmpy if { $tmpy == "a" } { set result $rega } set regb $result } } # in if { $opcode == "in" } { set xcarry 0 set tmpx $oprandx if { $tmpx == "a" } { set rega $inxval } if { $tmpx == "b" } { set regb $inxval } } # out if { $opcode == "out" } { set xcarry 0 set tmpx $oprandx set result $oprandx if { $tmpx == "b" } { set result $regb } set outxval $result } # jnc if { $opcode == "jnc" } { if { $xcarry == 0 } { set xpc $oprandx } else { set xpc [expr $xpc + 1] set xcarry 0 } } # jmp if { $opcode == "jmp" } { set xpc $oprandx set xcarry 0 } # PC if { $opcode != "jmp" && $opcode != "jnc" } { set xpc [expr $xpc + 1] } # get instrcution set code [string tolower $pgm($xpc)] set pgmcode $code # set code decode doDecode [getCode $pgm($xpc)] } proc getCode {x} { # get command set instructionx [string tolower [lindex $x 0] ] # get data set oprandx [string tolower [lindex $x end]] # splite set xcnt [string first "," $oprandx] if { $xcnt > 0 } { set oprandx [split $oprandx ","] } # default (JMP 15) set opcode 15 set oprand 15 # instruction ADD if { $instructionx == "add" } { set oprand [lindex $oprandx end] set tmpx [lindex $oprandx 0] if { $tmpx == "a" } { set opcode 0 } if { $tmpx == "b" } { set opcode 5 } } # instruction MOV if { $instructionx == "mov" } { set tmpx [lindex $oprandx 0] set tmpy [lindex $oprandx end] if { $tmpx == "a" } { set opcode 3 set oprand $tmpy if { $tmpy == "b" } { set opcode 1 set oprand 0 } } if { $tmpx == "b" } { set opcode 7 set oprand $tmpy if { $tmpy == "a" } { set opcode 4 set oprand 0 } } } # instruction IN if { $instructionx == "in" } { set oprand 0 if { $oprandx == "a" } { set opcode 2 } if { $oprandx == "b" } { set opcode 6 } } # instruction OUT if { $instructionx == "out" } { set opcode 11 set oprand $oprandx set tmpx [lindex $oprandx 0] if { $tmpx == "b" } { set opcode 9 set oprand 0 } } # instruction JNC if { $instructionx == "jnc" } { set opcode 14 set oprand $oprandx } # instruction JMP if { $instructionx == "jmp" } { set opcode 15 set oprand $oprandx } # concatenate return [format "%02X" [expr $opcode * 16 + $oprand]] } ####################################### # window area placing ####################################### grid .lblFileNameLabel -column 0 -row 0 grid .lblFileName -column 0 -row 1 grid .lstAsmcode -column 0 -row 2 grid .lblPC -column 0 -row 3 grid .lblCode -column 0 -row 4 grid .lblRegA -column 0 -row 5 grid .lblRegB -column 0 -row 6 grid .lblCarry -column 0 -row 7 grid .lblIN -column 0 -row 8 grid .lblOUT -column 0 -row 9 grid .lblDecode -column 0 -row 10 grid .scbLadderV -column 1 -row 2 -sticky ns grid .lstBCode -column 2 -row 2 grid .lblIndexV -column 2 -row 3 grid .lblCodeV -column 2 -row 4 grid .lblRegAV -column 2 -row 5 grid .lblRegBV -column 2 -row 6 grid .lblCarryV -column 2 -row 7 grid .txtINV -column 2 -row 8 grid .lblOUTV -column 2 -row 9 grid .lblDecodeV -column 2 -row 10 grid .btnLoad -column 3 -row 0 grid .scbLCodeV -column 3 -row 2 -sticky ns grid .btnStep -column 3 -row 3 grid .btnRst -column 3 -row 5 grid .btnExit -column 6 -row 11 GUIでは、次のようなイメージになります。ボタンは4種用意しています。
上から、次の機能を持ちます。
- Load アセンブリ言語で記述したソースコードをロード
- Step 1クリックで1命令を実行
- Reset プログラムカウンタ(PC)をゼロに、全レジスタ値をゼロで初期化
- Exit シミュレータを終了
 「IN」の右欄は、レジスタA、Bに外部からデータを入力する
場合に利用します。10進の1桁で指定します。
「IN」の右欄は、レジスタA、Bに外部からデータを入力する
場合に利用します。10進の1桁で指定します。
 「Load」ボタンを操作し、アセンブリ言語のソースコードを
入力すると、次の画面になります。
「Load」ボタンを操作し、アセンブリ言語のソースコードを
入力すると、次の画面になります。
 左にアセンブリ言語のソースコード、右にアセンブルした
機械語を16進数で付加して表示します。
シミュレータの中にアセンブラをもち、ソースコードに
間違いがないかを確認できます。
プログラムカウンタ(PC)の値で、実行する命令を「code」の
右に表示します。
左にアセンブリ言語のソースコード、右にアセンブルした
機械語を16進数で付加して表示します。
シミュレータの中にアセンブラをもち、ソースコードに
間違いがないかを確認できます。
プログラムカウンタ(PC)の値で、実行する命令を「code」の
右に表示します。
 「decode」の右には、データの発信と受信がどこになるのか
を表示してあります。
「decode」の右には、データの発信と受信がどこになるのか
を表示してあります。
 CPU動作が、値をレジスタからレジスタへの送受信と等価で
途中で加工しているという事実がわかるようにしています。
「Step」ボタンをクリックすると、命令を実行し
各レジスタの値更新します。またPCの値を更新し
次の命令を表示します。
CPU動作が、値をレジスタからレジスタへの送受信と等価で
途中で加工しているという事実がわかるようにしています。
「Step」ボタンをクリックすると、命令を実行し
各レジスタの値更新します。またPCの値を更新し
次の命令を表示します。
 「Reset」ボタンをクリックすると、PCをゼロにし
各レジスタをゼロで初期化します。
「Reset」ボタンをクリックすると、PCをゼロにし
各レジスタをゼロで初期化します。
 シミュレータの起動は簡単です。
ディレクトリ中にある「td4sim.tcl」をダブルクリックするだけ。
シミュレータの起動は簡単です。
ディレクトリ中にある「td4sim.tcl」をダブルクリックするだけ。
 Tcl/Tkは、Windowsでは「Active Tcl」をインストールして
利用します。Unix系OSでは、標準バンドルされているので
インストール作業は不要。
Tcl/Tkは、Windowsでは「Active Tcl」をインストールして
利用します。Unix系OSでは、標準バンドルされているので
インストール作業は不要。
目次 前 次