目次
前
次
走行パターン作成
MCR_VCマシンであるmugen2017は、6種の走行テートで移動します。
 カメラセンサーユニット(Game Boy Camera unit)から取得できるのは
次の13種のセンサー情報。
カメラセンサーユニット(Game Boy Camera unit)から取得できるのは
次の13種のセンサー情報。
- ALL_BLACK 0
- ALL_WHITE 1
- LEFT_WHITE 2
- RIGHT_WHITE 3
- CENTER 4
- TINY_RIGHT 5
- RIGHT 6
- BIG_RIGHT 7
- TINY_LEFT 8
- LEFT 9
- BIG_LEFT 10
- BOTH_WHITE 11
- ILLEAGAL 12
センサー情報と走行ステートを組み合わせると、移動に
必要となる左右モータのDUTY比を決定できます。
配列を利用して、走行ステートとセンサー情報に応じた
DUTY比を格納して利用します。
センサー情報は、0から12の数値になっているので
配列の添字として利用すれば、DUTY比を取得できる
ようにしてみました。
UBYTE nldx[13];
UBYTE nrdx[13];
UBYTE cldx[13];
UBYTE crdx[13];
UBYTE rldx[13];
UBYTE rrdx[13];
UBYTE lldx[13];
UBYTE lrdx[13];
UBYTE chldx[13];
UBYTE chrdx[13];
UBYTE blldx[13];
UBYTE blrdx[13];
void init_road_array()
{
/* NORMAL */
*(nldx+ALL_BLACK) = 10 ; *(nrdx+ALL_BLACK) = 10 ;
*(nldx+ALL_WHITE) = 30 ; *(nrdx+ALL_WHITE) = 30 ;
*(nldx+LEFT_WHITE) = 10 ; *(nrdx+LEFT_WHITE) = 10 ;
*(nldx+RIGHT_WHITE) = 10 ; *(nrdx+RIGHT_WHITE) = 10 ;
*(nldx+CENTER) = 50 ; *(nrdx+CENTER) = 50 ;
*(nldx+TINY_RIGHT) = 50 ; *(nrdx+TINY_RIGHT) = 55 ;
*(nldx+RIGHT) = 50 ; *(nrdx+RIGHT) = 60 ;
*(nldx+BIG_RIGHT) = 50 ; *(nrdx+BIG_RIGHT) = 65 ;
*(nldx+TINY_LEFT) = 55 ; *(nrdx+TINY_RIGHT) = 50 ;
*(nldx+LEFT) = 60 ; *(nrdx+RIGHT) = 50 ;
*(nldx+BIG_LEFT) = 65 ; *(nrdx+BIG_RIGHT) = 50 ;
*(nldx+BOTH_WHITE) = 10 ; *(nrdx+BIG_RIGHT) = 10 ;
*(nldx+ILLEAGAL) = 10 ; *(nrdx+ILLEAGAL) = 10 ;
/* CRANK */
*(cldx+ALL_BLACK) = 10 ; *(crdx+ALL_BLACK) = 10 ;
*(cldx+ALL_WHITE) = 10 ; *(crdx+ALL_WHITE) = 10 ;
*(cldx+LEFT_WHITE) = 10 ; *(crdx+LEFT_WHITE) = 10 ;
*(cldx+RIGHT_WHITE) = 30 ; *(crdx+RIGHT_WHITE) = 30 ;
*(cldx+CENTER) = 30 ; *(crdx+CENTER) = 35 ;
*(cldx+TINY_RIGHT) = 30 ; *(crdx+TINY_RIGHT) = 40 ;
*(cldx+RIGHT) = 30 ; *(crdx+RIGHT) = 45 ;
*(cldx+BIG_RIGHT) = 35 ; *(crdx+BIG_RIGHT) = 30 ;
*(cldx+TINY_LEFT) = 40 ; *(crdx+TINY_LEFT) = 30 ;
*(cldx+LEFT) = 45 ; *(crdx+LEFT) = 30 ;
*(cldx+BIG_LEFT) = 10 ; *(crdx+BIG_LEFT) = 10 ;
*(cldx+BOTH_WHITE) = 10 ; *(crdx+BOTH_WHITE) = 10 ;
*(cldx+ILLEAGAL) = 10 ; *(crdx+ILLEAGAL) = 10 ;
/* ROTATE */
*(rldx+ALL_BLACK) = 10 ; *(rrdx+ALL_BLACK) = 10 ;
*(rldx+ALL_WHITE) = 30 ; *(rrdx+ALL_WHITE) = 30 ;
*(rldx+LEFT_WHITE) = 10 ; *(rrdx+LEFT_WHITE) = 50 ;
*(rldx+RIGHT_WHITE) = 50 ; *(rrdx+RIGHT_WHITE) = 10 ;
*(rldx+CENTER) = 30 ; *(rrdx+CENTER) = 30 ;
*(rldx+TINY_RIGHT) = 30 ; *(rrdx+TINY_RIGHT) = 35 ;
*(rldx+RIGHT) = 30 ; *(rrdx+RIGHT) = 40 ;
*(rldx+BIG_RIGHT) = 30 ; *(rrdx+BIG_RIGHT) = 45 ;
*(rldx+TINY_LEFT) = 35 ; *(rrdx+TINY_LEFT) = 30 ;
*(rldx+LEFT) = 40 ; *(rrdx+LEFT) = 30 ;
*(rldx+BIG_LEFT) = 45 ; *(rrdx+BIG_LEFT) = 30 ;
*(rldx+BOTH_WHITE) = 25 ; *(rrdx+BOTH_WHITE) = 25 ;
*(rldx+ILLEAGAL) = 10 ; *(rrdx+ILLEAGAL) = 10 ;
/* LANE */
*(lldx+ALL_BLACK) = 10 ; *(lrdx+ALL_BLACK) = 10 ;
*(lldx+ALL_WHITE) = 30 ; *(lrdx+ALL_WHITE) = 30 ;
*(lldx+LEFT_WHITE) = 10 ; *(lrdx+LEFT_WHITE) = 50 ;
*(lldx+RIGHT_WHITE) = 50 ; *(lrdx+RIGHT_WHITE) = 10 ;
*(lldx+CENTER) = 30 ; *(lrdx+CENTER) = 30 ;
*(lldx+TINY_RIGHT) = 30 ; *(lrdx+TINY_RIGHT) = 35 ;
*(lldx+RIGHT) = 30 ; *(lrdx+RIGHT) = 40 ;
*(lldx+BIG_RIGHT) = 30 ; *(lrdx+BIG_RIGHT) = 45 ;
*(lldx+TINY_LEFT) = 35 ; *(lrdx+TINY_LEFT) = 30 ;
*(lldx+LEFT) = 40 ; *(lrdx+LEFT) = 30 ;
*(lldx+BIG_LEFT) = 45 ; *(lrdx+BIG_LEFT) = 30 ;
*(lldx+BOTH_WHITE) = 10 ; *(lrdx+BOTH_WHITE) = 10 ;
*(lldx+ILLEAGAL) = 10 ; *(lrdx+ILLEAGAL) = 10 ;
/* CHANGE */
*(chldx+ALL_BLACK) = 10 ; *(chrdx+ALL_BLACK) = 10 ;
*(chldx+ALL_WHITE) = 50 ; *(chrdx+ALL_WHITE) = 50 ;
*(chldx+LEFT_WHITE) = 10 ; *(chrdx+LEFT_WHITE) = 50 ;
*(chldx+RIGHT_WHITE) = 50 ; *(chrdx+RIGHT_WHITE) = 10 ;
*(chldx+CENTER) = 50 ; *(chrdx+CENTER) = 50 ;
*(chldx+TINY_RIGHT) = 55 ; *(chrdx+TINY_RIGHT) = 50 ;
*(chldx+RIGHT) = 60 ; *(chrdx+RIGHT) = 50 ;
*(chldx+BIG_RIGHT) = 65 ; *(chrdx+BIG_RIGHT) = 50 ;
*(chldx+TINY_LEFT) = 50 ; *(chrdx+TINY_LEFT) = 55 ;
*(chldx+LEFT) = 50 ; *(chrdx+LEFT) = 60 ;
*(chldx+BIG_LEFT) = 50 ; *(chrdx+BIG_LEFT) = 65 ;
*(chldx+BOTH_WHITE) = 10 ; *(chrdx+BOTH_WHITE) = 10 ;
*(chldx+ILLEAGAL) = 10 ; *(chrdx+ILLEAGAL) = 10 ;
/* BLIND */
*(blldx+ALL_BLACK) = 10 ; *(blrdx+ALL_BLACK) = 10 ;
*(blldx+ALL_WHITE) = 50 ; *(blrdx+ALL_WHITE) = 50 ;
*(blldx+LEFT_WHITE) = 50 ; *(blrdx+LEFT_WHITE) = 10 ;
*(blldx+RIGHT_WHITE) = 10 ; *(blrdx+RIGHT_WHITE) = 50 ;
*(blldx+CENTER) = 50 ; *(blrdx+CENTER) = 50 ;
*(blldx+TINY_RIGHT) = 55 ; *(blrdx+TINY_RIGHT) = 50 ;
*(blldx+RIGHT) = 60 ; *(blrdx+RIGHT) = 50 ;
*(blldx+BIG_RIGHT) = 65 ; *(blrdx+BIG_RIGHT) = 50 ;
*(blldx+TINY_LEFT) = 50 ; *(blrdx+TINY_LEFT) = 55 ;
*(blldx+LEFT) = 50 ; *(blrdx+LEFT) = 60 ;
*(blldx+BIG_LEFT) = 50 ; *(blrdx+BIG_LEFT) = 65 ;
*(blldx+BOTH_WHITE) = 10 ; *(blrdx+BOTH_WHITE) = 10 ;
*(blldx+ILLEAGAL) = 10 ; *(blrdx+ILLEAGAL) = 10 ;
}
上のように定義して、利用するメモリの容量は、13x2x6=156バイト
にしかなりません。実際に走行させ、左右のモータの固体差を吸収
へと持ち込みます。
少し冗長なので、次のように16ビットの配列で、左右のモータの
DUTY比が一目でわかるようにしました。
UWORD ndx[13];
UWORD cdx[13];
UWORD rdx[13];
UWORD ldx[13];
UWORD chdx[13];
UWORD bldx[13];
void init_road_array()
{
/* NORMAL */
*(ndx+ALL_BLACK) = (10 << 8) | 10 ;
*(ndx+ALL_WHITE) = (30 << 8) | 30 ;
*(ndx+LEFT_WHITE) = (10 << 8) | 10 ;
*(ndx+RIGHT_WHITE) = (10 << 8) | 10 ;
*(ndx+CENTER) = (50 << 8) | 50 ;
*(ndx+TINY_RIGHT) = (50 << 8) | 55 ;
*(ndx+RIGHT) = (50 << 8) | 60 ;
*(ndx+BIG_RIGHT) = (50 << 8) | 65 ;
*(ndx+TINY_LEFT) = (55 << 8) | 50 ;
*(ndx+LEFT) = (60 << 8) | 50 ;
*(ndx+BIG_LEFT) = (65 << 8) | 50 ;
*(ndx+BOTH_WHITE) = (10 << 8) | 10 ;
*(ndx+ILLEAGAL) = (10 << 8) | 10 ;
/* CRANK */
*(cdx+ALL_BLACK) = (10 << 8) | 10 ;
*(cdx+ALL_WHITE) = (10 << 8) | 10 ;
*(cdx+LEFT_WHITE) = (10 << 8) | 10 ;
*(cdx+RIGHT_WHITE) = (10 << 8) | 10 ;
*(cdx+CENTER) = (30 << 8) | 30 ;
*(cdx+TINY_RIGHT) = (30 << 8) | 35 ;
*(cdx+RIGHT) = (30 << 8) | 40 ;
*(cdx+BIG_RIGHT) = (30 << 8) | 45 ;
*(cdx+TINY_LEFT) = (35 << 8) | 30 ;
*(cdx+LEFT) = (40 << 8) | 30 ;
*(cdx+BIG_LEFT) = (45 << 8) | 30 ;
*(cdx+BOTH_WHITE) = (10 << 8) | 10 ;
*(cdx+ILLEAGAL) = (10 << 8) | 10 ;
/* ROTATE */
*(rdx+ALL_BLACK) = (10 << 8) | 10 ;
*(rdx+ALL_WHITE) = (30 << 8) | 30 ;
*(rdx+LEFT_WHITE) = (10 << 8) | 50 ;
*(rdx+RIGHT_WHITE) = (50 << 8) | 10 ;
*(rdx+CENTER) = (30 << 8) | 30 ;
*(rdx+TINY_RIGHT) = (30 << 8) | 35 ;
*(rdx+RIGHT) = (30 << 8) | 40 ;
*(rdx+BIG_RIGHT) = (30 << 8) | 45 ;
*(rdx+TINY_LEFT) = (35 << 8) | 30 ;
*(rdx+LEFT) = (40 << 8) | 30 ;
*(rdx+BIG_LEFT) = (45 << 8) | 30 ;
*(rdx+BOTH_WHITE) = (25 << 8) | 25 ;
*(rdx+ILLEAGAL) = (10 << 8) | 10 ;
/* LANE */
*(ldx+ALL_BLACK) = (10 << 8) | 10 ;
*(ldx+ALL_WHITE) = (30 << 8) | 30 ;
*(ldx+LEFT_WHITE) = (10 << 8) | 50 ;
*(ldx+RIGHT_WHITE) = (50 << 8) | 10 ;
*(ldx+CENTER) = (30 << 8) | 30 ;
*(ldx+TINY_RIGHT) = (30 << 8) | 35 ;
*(ldx+RIGHT) = (30 << 8) | 40 ;
*(ldx+BIG_RIGHT) = (30 << 8) | 45 ;
*(ldx+TINY_LEFT) = (35 << 8) | 30 ;
*(ldx+LEFT) = (40 << 8) | 30 ;
*(ldx+BIG_LEFT) = (45 << 8) | 30 ;
*(ldx+BOTH_WHITE) = (10 << 8) | 10 ;
*(ldx+ILLEAGAL) = (10 << 8) | 10 ;
/* CHANGE */
*(chdx+ALL_BLACK) = (10 << 8) | 10 ;
*(chdx+ALL_WHITE) = (50 << 8) | 50 ;
*(chdx+LEFT_WHITE) = (10 << 8) | 50 ;
*(chdx+RIGHT_WHITE) = (50 << 8) | 10 ;
*(chdx+CENTER) = (50 << 8) | 50 ;
*(chdx+TINY_RIGHT) = (55 << 8) | 50 ;
*(chdx+RIGHT) = (60 << 8) | 50 ;
*(chdx+BIG_RIGHT) = (65 << 8) | 50 ;
*(chdx+TINY_LEFT) = (50 << 8) | 55 ;
*(chdx+LEFT) = (50 << 8) | 60 ;
*(chdx+BIG_LEFT) = (50 << 8) | 65 ;
*(chdx+BOTH_WHITE) = (10 << 8) | 10 ;
*(chdx+ILLEAGAL) = (10 << 8) | 10 ;
/* BLIND */
*(bldx+ALL_BLACK) = (10 << 8) | 10 ;
*(bldx+ALL_WHITE) = (50 << 8) | 50 ;
*(bldx+LEFT_WHITE) = (10 << 8) | 50 ;
*(bldx+RIGHT_WHITE) = (50 << 8) | 10 ;
*(bldx+CENTER) = (50 << 8) | 50 ;
*(bldx+TINY_RIGHT) = (55 << 8) | 50 ;
*(bldx+RIGHT) = (60 << 8) | 50 ;
*(bldx+BIG_RIGHT) = (65 << 8) | 50 ;
*(bldx+TINY_LEFT) = (50 << 8) | 55 ;
*(bldx+LEFT) = (50 << 8) | 60 ;
*(bldx+BIG_LEFT) = (50 << 8) | 65 ;
*(bldx+BOTH_WHITE) = (10 << 8) | 10 ;
*(bldx+ILLEAGAL) = (10 << 8) | 10 ;
}
行数は同じですが配列の個数が減るのと、左右で
DUTY比がわかるので、こちらの方がよいと判断。
スプレッドシートを利用すれば、変数名、文字列、左右のDUTY比を
書いてCSV形式で出力すれば、すぐに生成できるでしょう。
スプレッドシートを使うまでもないとして、次のAWKのスクリプトで
コードを生成しました。
{
printf("*(%s+%s) = (%d << 8) | %d ;\n",$1,$2,$3,$4)
}
AWKのスクリプトに与える内容は、次のリストでテキストファイルに。
bldx ALL_BLACK 10 10
bldx ALL_WHITE 50 50
bldx LEFT_WHITE 10 50
bldx RIGHT_WHITE 50 10
bldx CENTER 50 50
bldx TINY_RIGHT 55 50
bldx RIGHT 60 50
bldx BIG_RIGHT 65 50
bldx TINY_LEFT 50 55
bldx LEFT 50 60
bldx BIG_LEFT 50 65
bldx BOTH_WHITE 10 10
bldx ILLEAGAL 10 10
スプレッドシートを立ち上げる時間が勿体ないので
6種のテキストファイルを用意して、一気にコード
を生成できました。
走行ステートに合わせたDUTY比を設定しているので
個別の走行ステートの移動をテストできます。
大きなコースを持たないでも、移動テストができる
という長所あり。
センサー情報との連携を考えると、基板上にある2つのLEDを使い
ALL_WHITE、LEFT_WHITE、RIGHIT_WHITEを表示します。
 DUTY比とセンサー値の方は、8個のLEDを1セットとして2セット
あるので表示して、走行しているときの状態がわかるようにします。
DUTY比とセンサー値の方は、8個のLEDを1セットとして2セット
あるので表示して、走行しているときの状態がわかるようにします。
 DUTY比は、左右で0から99までの数値として定義されるので
8で割ったときの商を求め、左右のLED4個で表示。8で割る
のは右に3ビットシフトなので、計算時間を短くできます。
DUTY比は、左右で0から99までの数値として定義されるので
8で割ったときの商を求め、左右のLED4個で表示。8で割る
のは右に3ビットシフトなので、計算時間を短くできます。
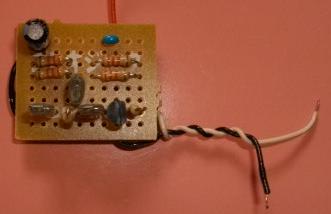
 DUTY比の他に、走行モードを音で出力します。
音を出すとうるさいので、AMワイヤレスマイクを使い
AMラジオに送信。
DUTY比の他に、走行モードを音で出力します。
音を出すとうるさいので、AMワイヤレスマイクを使い
AMラジオに送信。
 4番ピンはリセットなので、音声周波数帯の信号を入れて
変調します。無変調でも、雑音くらいは聞こえますが。
送信範囲は半径10m四方であればよいので、1mくらいの
ビニル線を接続してアンテナとしておきます。
回路は、単純で発振ICの定番555を利用。
4番ピンはリセットなので、音声周波数帯の信号を入れて
変調します。無変調でも、雑音くらいは聞こえますが。
送信範囲は半径10m四方であればよいので、1mくらいの
ビニル線を接続してアンテナとしておきます。
回路は、単純で発振ICの定番555を利用。
 530kHzから880kHzまで可変できるので、札幌、大阪で
ラジオ局の周波数が異なっても、送信周波数を変えて対応可能
にしました。
電波法にかからないようにして、次のレシーバで音を捕捉。
530kHzから880kHzまで可変できるので、札幌、大阪で
ラジオ局の周波数が異なっても、送信周波数を変えて対応可能
にしました。
電波法にかからないようにして、次のレシーバで音を捕捉。
 ゲルマニウムダイオードを利用し、トランジスタ一石で増幅。
クリスタルイアフォンで聞けます。
スピーカで聞きたい場合には、次のアンプを追加。
ゲルマニウムダイオードを利用し、トランジスタ一石で増幅。
クリスタルイアフォンで聞けます。
スピーカで聞きたい場合には、次のアンプを追加。
 マシン上のコンピュータは、走行モードにあわせたデータを
取り出す処理が必要になりますが、次のように単純。
#define MASKFF 0xff
UBYTE xmul ;
UBYTE flag ;
UBYTE xsensor ;
UWORD tmp ;
/* default */
flag = OFF ;
/* show state */
mstate = 1 ;
show_state( mstate );
/* get sensor */
xsensor = get_sensor();
/* update motor duty ratio */
tmp = *(ndx+xsensor);
left = (tmp >> 8) & MASKFF ;
right = tmp & MASKFF ;
/* default */
*(dir+0) = DIR_CENTER ;
*(dir+1) = DIR_CENTER ;
/* get sensor */
if ( xsensor == CENTER ) {
/* climb hill or down hill */
if ( sloap ) {
xmul = *(sloapt+sloap) ;
left = (UBYTE)( xmul * left * 1.0 / 100 );
right = (UBYTE)( xmul * right * 1.0 / 100 );
}
}
/* update */
send_dc(left,right);
/* judge */
if ( xsensor == ALL_WHITE ) {
rsm_tsk(CRANK);
flag = ON ;
}
if ( xsensor == LEFT_WHITE ) {
*(dir+0) = DIR_LEFT ;
*(dir+1) = DIR_RIGHT ;
rsm_tsk(LANE);
flag = ON ;
}
if ( xsensor == RIGHT_WHITE ) {
*(dir+0) = DIR_RIGHT ;
*(dir+0) = DIR_LEFT ;
rsm_tsk(LANE);
flag = ON ;
}
/* cyclic */
if ( flag == ON ) {
flag = OFF ;
slp_tsk();
} else {
wai_tsk( 10 );
}
走行モードを表示するには、関数show_stateを利用しますが
該当するLEDを点灯するだけで対応可能。
void show_state(UBYTE x)
{
UBYTE result;
/* generate code */
result = (1 << x);
/* impress */
P4DR = result ^ MASKFF ;
}
DUTY比の表示は、次の処理にパラメータを渡すだけ。
void show_duty(UBYTE ldx,UBYTE rdx)
{
UBYTE result ;
/* clear */
P3DR = 0x00 ;
/* clear */
result = 0 ;
/* upper */
result |= ((ldx >> 3) << 4) ;
/* lower */
result |= (rdx >> 3) ;
/* send */
P3DR = result ^ MASKFF ;
}
左右のDUTY比は、変数left、rightに格納されているので
それらを関数show_dutyに与えるだけで充分。
路面状態は、配列にパターンを格納してLEDに転送する
ことで対応します。
UBYTE road_pat[13] ;
void init_road_pat(void)
{
*(road_pat+ALL_BLACK) = 0x00 ; *(road_pat+ALL_WHITE) = 0xff ;
*(road_pat+LEFT_WHITE) = 0xf0 ; *(road_pat+RIGHT_WHITE) = 0x0f ;
*(road_pat+CENTER) = 0x18 ; *(road_pat+TINY_RIGHT) = 0x0c ;
*(road_pat+RIGHT) = 0x06 ; *(road_pat+BIG_RIGHT) = 0x03 ;
*(road_pat+TINY_LEFT) = 0x30 ; *(road_pat+LEFT) = 0x60 ;
*(road_pat+BIG_LEFT) = 0xc0 ; *(road_pat+BOTH_WHITE) = 0xc3 ;
*(road_pat+ILLEAGAL) = 0x5a ;
}
void show_road(UBYTE x)
{
UBYTE result ;
/* clear */
PADR = 0x00 ;
/* get pattern */
result = *(road_pat+x) ;
/* send */
PADR = result ^ MASKFF ;
}
音で走行モードを提示するには、周波数の変更が必要なので
発振ICの555の発振周波数を変更して対応。
RC発振回路の抵抗分Rをアナログスイッチで切り替えます。
マシン上のコンピュータは、走行モードにあわせたデータを
取り出す処理が必要になりますが、次のように単純。
#define MASKFF 0xff
UBYTE xmul ;
UBYTE flag ;
UBYTE xsensor ;
UWORD tmp ;
/* default */
flag = OFF ;
/* show state */
mstate = 1 ;
show_state( mstate );
/* get sensor */
xsensor = get_sensor();
/* update motor duty ratio */
tmp = *(ndx+xsensor);
left = (tmp >> 8) & MASKFF ;
right = tmp & MASKFF ;
/* default */
*(dir+0) = DIR_CENTER ;
*(dir+1) = DIR_CENTER ;
/* get sensor */
if ( xsensor == CENTER ) {
/* climb hill or down hill */
if ( sloap ) {
xmul = *(sloapt+sloap) ;
left = (UBYTE)( xmul * left * 1.0 / 100 );
right = (UBYTE)( xmul * right * 1.0 / 100 );
}
}
/* update */
send_dc(left,right);
/* judge */
if ( xsensor == ALL_WHITE ) {
rsm_tsk(CRANK);
flag = ON ;
}
if ( xsensor == LEFT_WHITE ) {
*(dir+0) = DIR_LEFT ;
*(dir+1) = DIR_RIGHT ;
rsm_tsk(LANE);
flag = ON ;
}
if ( xsensor == RIGHT_WHITE ) {
*(dir+0) = DIR_RIGHT ;
*(dir+0) = DIR_LEFT ;
rsm_tsk(LANE);
flag = ON ;
}
/* cyclic */
if ( flag == ON ) {
flag = OFF ;
slp_tsk();
} else {
wai_tsk( 10 );
}
走行モードを表示するには、関数show_stateを利用しますが
該当するLEDを点灯するだけで対応可能。
void show_state(UBYTE x)
{
UBYTE result;
/* generate code */
result = (1 << x);
/* impress */
P4DR = result ^ MASKFF ;
}
DUTY比の表示は、次の処理にパラメータを渡すだけ。
void show_duty(UBYTE ldx,UBYTE rdx)
{
UBYTE result ;
/* clear */
P3DR = 0x00 ;
/* clear */
result = 0 ;
/* upper */
result |= ((ldx >> 3) << 4) ;
/* lower */
result |= (rdx >> 3) ;
/* send */
P3DR = result ^ MASKFF ;
}
左右のDUTY比は、変数left、rightに格納されているので
それらを関数show_dutyに与えるだけで充分。
路面状態は、配列にパターンを格納してLEDに転送する
ことで対応します。
UBYTE road_pat[13] ;
void init_road_pat(void)
{
*(road_pat+ALL_BLACK) = 0x00 ; *(road_pat+ALL_WHITE) = 0xff ;
*(road_pat+LEFT_WHITE) = 0xf0 ; *(road_pat+RIGHT_WHITE) = 0x0f ;
*(road_pat+CENTER) = 0x18 ; *(road_pat+TINY_RIGHT) = 0x0c ;
*(road_pat+RIGHT) = 0x06 ; *(road_pat+BIG_RIGHT) = 0x03 ;
*(road_pat+TINY_LEFT) = 0x30 ; *(road_pat+LEFT) = 0x60 ;
*(road_pat+BIG_LEFT) = 0xc0 ; *(road_pat+BOTH_WHITE) = 0xc3 ;
*(road_pat+ILLEAGAL) = 0x5a ;
}
void show_road(UBYTE x)
{
UBYTE result ;
/* clear */
PADR = 0x00 ;
/* get pattern */
result = *(road_pat+x) ;
/* send */
PADR = result ^ MASKFF ;
}
音で走行モードを提示するには、周波数の変更が必要なので
発振ICの555の発振周波数を変更して対応。
RC発振回路の抵抗分Rをアナログスイッチで切り替えます。
 コンピュータからは、どの周波数を利用するのかを
3ビットの選択信号で指定するだけ。
コンピュータからは、どの周波数を利用するのかを
3ビットの選択信号で指定するだけ。
目次
前
次
