ファームウエア検討
2015年まで、ファームウエアは外国人研修担当時に作成した H8/3048用のものを加筆、修正したコードを使っていました。 マルチプロセッサ構成で、新シャーシを使ったメカには 相応しくない内容なので、一新します。 研修担当時に作成したファームウエアでは、密着タイプセンサー を使っていました。GBC(Game Boy Camera)に合わせた処理に変更し、最上位のデバイスは GBCの出力情報を使って移動方法を決定後、DCモータにPWM波形で使う DUTY比を出力すると機能限定します。 入力、出力に必要なビット数を見積もります。 入力 GBCを担当するプロセッサはArduino互換で、4ビットで構成した 情報を利用。 #define ALL_BLACK 0 #define ALL_WHITE 1 #define LEFT_WHITE 2 #define RIGHT_WHITE 3 #define CENTER 4 #define TINY_RIGHT 5 #define RIGHT 6 #define BIG_RIGHT 7 #define TINY_LEFT 8 #define LEFT 9 #define BIG_LEFT 10 #define BOTH_WHITE 11 #define ILLEAGAL 12 この4ビットの他に、スタートゲートの開閉状態とスタートスイッチ の状態を受取る3ビットを用意すれば、入力はおしまい。 入力は合計7ビットですが、1ビットの予備を考え8ビット。 出力 DCモータを動かすために、2ビット必要。 センサーと内部状態を表示するには、各8ビットあれば充分。 合算すると、2+8+8=18になります。 センサーと内部状態を表示する、各8ビットは74HC164のような シフトレジスタを間に入れると、転送クロック、データ2ビット の合計3ビットで処理可能。 必要なビット数は、2+3=5になります。 回路は、次のように単純にできます。
マイコンからは、3ピンで2ブロックのLEDを制御。
- DCLK
- sensor_data
- state_data
 タイヤ円周は、2πr(rは半径)より、57πmm。
πを3と近似すると、1回転で171mm移動可能に。
1回転を正の整数で除算すると、次の移動距離に。
タイヤ円周は、2πr(rは半径)より、57πmm。
πを3と近似すると、1回転で171mm移動可能に。
1回転を正の整数で除算すると、次の移動距離に。
- 1/9 => 19 mm
- 1/8 => 21 mm
- 1/7 => 24 mm
- 1/6 => 28 mm
- 1/5 => 34 mm
- 1/4 => 42 mm
- 1/3 => 57 mm
- 1/2 => 85 mm
 左右の回転数の差を求め、移動距離の差に換算し
arc tangentを取れば、回転角度を計算できます。
瞬時値から、その時点のベクトルを判断できます。
左右の回転数の差を求め、移動距離の差に換算し
arc tangentを取れば、回転角度を計算できます。
瞬時値から、その時点のベクトルを判断できます。
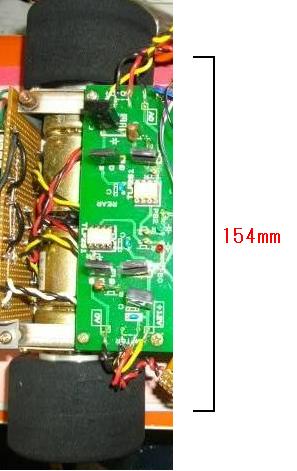
 角度を計算するには、縦、横の値が必要。縦はタイヤの
回転数の差で求められ、横はモーターのシャフト長で
固定値になります。
シャフト長は、固定で154mm。
角度を計算するには、縦、横の値が必要。縦はタイヤの
回転数の差で求められ、横はモーターのシャフト長で
固定値になります。
シャフト長は、固定で154mm。
 左右の回転数の差が0.5であれば、回転角度は45度程度。
マシンが走行している状態で、45度という回転角度は
スピンするくらいの大きな力をかけることになります。
スピンしないでラインを追従するには、回転数の差が
0.01から0.2程度にするとわかります。
車速感応制御で、滑らかなに走行させることも考えて
おかないと。
回転数の差を求めるには、ロータリーエンコーダを使うことが
知られていますが、モータに流れる電流値で回転数を算出する
ことも可能。メカに制約がある場合、電流値による回転数算出
を利用することに。
ここまでで大まかな処理を決めたので、APIを利用してトップレベル
のコードを作成します。
int main(void)
{
/* initialize */
init_usr();
/* detect start gate state */
sgate = get_start();
while ( sgate == CLOSED ) {
/* delay 100ms */
delay_ms(100);
/* get start gate state */
sgate = get_start();
}
/* endless loop */
while ( ON ) {
/* get sensor state */
sensor = get_sensor();
/* judge mode */
switch ( mode ) {
case MD_NORMAL : mode = execute_normal(sensor); break ;
case MD_CRANK : mode = execute_crank(sensor) ; break ;
case MD_ROTATE : mode = execute_rotate(sensor); break ;
case MD_LANE : mode = execute_lane(sensor); break ;
case MD_CHANGE : mode = execute_change(sensor); break ;
case MD_BLIND : mode = execute_blind(sensor); break ;
default : break ;
}
/* delay 100ms */
delay_ms(100);
}
/* dummy */
return 0 ;
}
トップレベルの処理から展開していくと以下。
#include <ADuC7026.h>
#define OFF 0
#define ON OFF+1
#define NO 0
#define YES NO+1
/* data definitions */
typedef unsigned char UBYTE ;
typedef signed char SBYTE ;
typedef unsigned short UWORD ;
typedef signed short SWORD ;
typedef unsigned long ULONG ;
typedef signed long SLONG ;
void IRQ_Handler(void) __irq;
void init_usr(void);
/*--------------------*/
/* function prototype */
/*--------------------*/
void delay_100us(UWORD x);
void delay_ms(UWORD x);
/*---------------*/
/* FPGA handling */
/*---------------*/
UBYTE execute_normal(UBYTE x);
UBYTE execute_crank(UBYTE x);
UBYTE execute_rotate(UBYTE x);
UBYTE execute_lane(UBYTE x);
UBYTE execute_change(UBYTE x);
UBYTE execute_blind(UBYTE x);
UBYTE get_start(void);
UBYTE get_sensor(void);
void send_duty(UBYTE which,UBYTE x);
void update_motor(void);
/* global variables */
volatile ULONG timcnt ;
volatile UBYTE lduty ;
volatile UBYTE rduty ;
volatile UBYTE dir[2] ;
#define MD_NONE 0
#define MD_NORMAL MD_NONE+1
#define MD_CRANK MD_NONE+2
#define MD_ROTATE MD_NONE+3
#define MD_LANE MD_NONE+4
#define MD_CHANGE MD_NONE+5
#define MD_BLIND MD_NONE+6
#define ALL_BLACK 0
#define ALL_WHITE 1
#define LEFT_WHITE 2
#define RIGHT_WHITE 3
#define CENTER 4
#define TINY_RIGHT 5
#define RIGHT 6
#define BIG_RIGHT 7
#define TINY_LEFT 8
#define LEFT 9
#define BIG_LEFT 10
#define BOTH_WHITE 11
#define ILLEAGAL 12
#define TRG 18
#define BLD 17
#define ALD 16
#define MASK0F 0x0f
#define DIR_CENTER 0
#define DIR_RIGHT DIR_CENTER+1
#define DIR_LEFT DIR_CENTER+2
#define CLOSED 0
#define OPENED CLOSED+1
volatile UBYTE sgate ;
volatile UBYTE sensor ;
volatile UBYTE mode ;
void main(void)
{
/* initialize */
init_usr();
/* detect start gate state */
while ( sgate == CLOSED ) {
/* delay 100ms */
delay_ms(100);
/* get start gate state */
sgate = get_start();
}
/* endless loop */
while ( ON ) {
/* get sensor state */
sensor = get_sensor();
/* judge mode */
switch ( mode ) {
case MD_NORMAL : mode = execute_normal(sensor); break ;
case MD_CRANK : mode = execute_crank(sensor) ; break ;
case MD_ROTATE : mode = execute_rotate(sensor); break ;
case MD_LANE : mode = execute_lane(sensor); break ;
case MD_CHANGE : mode = execute_change(sensor); break ;
case MD_BLIND : mode = execute_blind(sensor); break ;
default : break ;
}
/* delay 100ms */
delay_ms(100);
}
}
void IRQ_Handler(void) __irq
{
/* judge timer0 interruption (100us) */
if ( (IRQSTA & RTOS_TIMER_BIT) == RTOS_TIMER_BIT ) {
/* clear timer0 interrupt flag */
T0CLRI = 0xff ;
/* increment */
timcnt++ ;
/* judge */
if ( (timcnt & 0xfff) == 0 ) { GP4DAT ^= (1 << 23); }
}
}
void init_usr(void)
{
/* select clock 10.44MHz
initialized in start up routine
*/
PLLKEY1 = 0xaa ;
PLLCON = 0x01 ;
PLLKEY2 = 0x55 ;
/* power control
initialized in start up routine
*/
/* initialize UART */
{
/* set baud rate 19200 bps CD = 2 */
COMCON0 = 0x80 ; /* select COMDIV1 and COMDIV0 */
COMDIV0 = 0x11 ;
COMDIV1 = 0x00 ;
/* set conditions */
COMCON0 = 0x03 ; /* select COMRX and COMTX , 8bit data , 1 stop bit , no parity */
/* enable interrupt */
COMIEN0 = 0x01 ; /* ERBFI */
}
/* P0 */
{
/* use GPIO */
GP0CON = 0x00000000 ;
/* */
GP0DAT = 0xDF1F0000 ;
}
/* P1 */
{
/* use UART */
GP1CON = 0x00000011 ;
/* */
GP1DAT = 0xfef00000 ;
}
/* P2 */
{
/* all bits inputs */
GP2DAT = 0x00000000 ;
}
/* P3 */
{
/* all bits outputs */
GP3DAT = 0xff000000 ;
}
/* P4 */
{
/* all bits outputs */
GP4DAT = 0xff030000 ;
}
/* initialize timer 0 (10kHz) */
{
T0LD = 1044 ; /* (10.44MHz / 1) / 10kHz */
T0CON = 0xc0 ; /* enable , cyclic , 1/1 */
}
timcnt = 0 ;
lduty = 0 ;
rduty = 0 ;
update_motor();
mode = MD_NONE ;
sgate = CLOSED ;
/* enable timer 0 interrupt */
IRQEN = RTOS_TIMER_BIT ;
}
void delay_100us(UWORD x)
{
ULONG last ;
/* calculate */
last = timcnt + x ;
/* wait */
while ( timcnt < last ) ;
}
void delay_ms(UWORD x)
{
ULONG last ;
/* calculate */
last = timcnt + 10 * x ;
/* wait */
while ( timcnt < last ) ;
}
UBYTE execute_normal(UBYTE x)
{
UBYTE state ;
UBYTE dtime ;
/* default */
lduty = 30 ;
rduty = 30 ;
dtime = 30 ;
state = MD_NORMAL ;
if ( x == ALL_BLACK )
{
lduty = 10 ; rduty = 10 ; dtime = 10 ;
}
if ( x == ALL_WHITE )
{
lduty = 30 ; rduty = 30 ; dtime = 30 ;
}
if ( x == LEFT_WHITE || x == RIGHT_WHITE || x == CENTER )
{
lduty = 50 ; rduty = 50 ; dtime = 30 ;
}
if ( x == TINY_RIGHT )
{
lduty = 50 ; rduty = 55 ; dtime = 25 ;
}
if ( x == RIGHT )
{
lduty = 50 ; rduty = 60 ; dtime = 25 ;
}
if ( x == BIG_RIGHT )
{
lduty = 50 ; rduty = 70 ; dtime = 25 ;
}
if ( x == TINY_LEFT )
{
lduty = 55 ; rduty = 50 ; dtime = 25 ;
}
if ( x == LEFT )
{
lduty = 60 ; rduty = 50 ; dtime = 25 ;
}
if ( x == BIG_LEFT )
{
lduty = 70 ; rduty = 50 ; dtime = 25 ;
}
if ( x == BOTH_WHITE )
{
lduty = 30 ; rduty = 30 ; dtime = 10 ;
}
/* update motor parameters */
update_motor();
delay_ms( dtime );
*(dir+0) = DIR_CENTER;
if ( x == ALL_WHITE )
{
state = MD_CRANK ;
}
if ( x == LEFT_WHITE )
{
state = MD_LANE ;
*(dir+0) = DIR_LEFT ;
}
if ( x == RIGHT_WHITE )
{
state = MD_LANE ;
*(dir+0) = DIR_RIGHT ;
}
return state;
}
UBYTE execute_crank(UBYTE x)
{
UBYTE state ;
UBYTE dtime ;
/* default */
lduty = 30 ;
rduty = 30 ;
dtime = 30 ;
if ( x == ALL_BLACK )
{
lduty = 10 ; rduty = 10 ; dtime = 10 ;
}
if ( x == ALL_WHITE )
{
lduty = 30 ; rduty = 30 ; dtime = 10 ;
}
if ( x == LEFT_WHITE )
{
lduty = 30 ; rduty = 30 ; dtime = 20 ;
}
if ( x == RIGHT_WHITE )
{
lduty = 30 ; rduty = 30 ; dtime = 20 ;
}
if ( x == CENTER )
{
lduty = 40 ; rduty = 40 ; dtime = 30 ;
}
if ( x == TINY_RIGHT )
{
lduty = 40 ; rduty = 45 ; dtime = 25 ;
}
if ( x == RIGHT )
{
lduty = 40 ; rduty = 50 ; dtime = 25 ;
}
if ( x == BIG_RIGHT )
{
lduty = 40 ; rduty = 55 ; dtime = 25 ;
}
if ( x == TINY_LEFT )
{
lduty = 45 ; rduty = 40 ; dtime = 25 ;
}
if ( x == LEFT )
{
lduty = 50 ; rduty = 40 ; dtime = 25 ;
}
if ( x == BIG_LEFT )
{
lduty = 55 ; rduty = 40 ; dtime = 25 ;
}
if ( x == BOTH_WHITE )
{
lduty = 30 ; rduty = 30 ; dtime = 20 ;
}
/* update motor parameters */
update_motor();
delay_ms( dtime );
state = MD_CRANK ;
*(dir+0) = DIR_CENTER;
if ( x == ALL_WHITE )
{
state = MD_CRANK ;
}
if ( x == LEFT_WHITE )
{
state = MD_LANE ;
*(dir+0) = DIR_LEFT ;
}
if ( x == RIGHT_WHITE )
{
state = MD_LANE ;
*(dir+0) = DIR_RIGHT ;
}
return state;
}
UBYTE execute_rotate(UBYTE x)
{
UBYTE state ;
UBYTE dtime ;
dtime = 30 ;
state = MD_ROTATE ;
if ( dir == DIR_LEFT )
{
lduty = 30 ; rduty = 50 ;
}
if ( dir == DIR_RIGHT )
{
lduty = 50 ; rduty = 30 ;
}
/* update motor parameters */
update_motor();
delay_ms( dtime );
if ( x == CENTER )
{
lduty = 30 ; rduty = 30 ; *(dir+0) = DIR_CENTER ; state = MD_NORMAL ;
}
return state;
}
UBYTE execute_lane(UBYTE x)
{
UBYTE state ;
UBYTE dtime ;
/* default */
lduty = 30 ;
rduty = 30 ;
dtime = 30 ;
state = MD_LANE ;
if ( x == ALL_BLACK )
{
lduty = 10 ; rduty = 10 ; dtime = 10 ;
}
if ( x == ALL_WHITE )
{
lduty = 30 ; rduty = 30 ; dtime = 10 ;
}
if ( x == LEFT_WHITE || x == RIGHT_WHITE )
{
lduty = 30 ; rduty = 30 ; dtime = 30 ;
}
if ( x == CENTER )
{
lduty = 40 ; rduty = 40 ; dtime = 30 ;
}
if ( x == TINY_RIGHT )
{
lduty = 40 ; rduty = 45 ; dtime = 25 ;
}
if ( x == RIGHT )
{
lduty = 40 ; rduty = 50 ; dtime = 25 ;
}
if ( x == BIG_RIGHT )
{
lduty = 40 ; rduty = 55 ; dtime = 25 ;
}
if ( x == TINY_LEFT )
{
lduty = 45 ; rduty = 40 ; dtime = 25 ;
}
if ( x == LEFT )
{
lduty = 50 ; rduty = 40 ; dtime = 25 ;
}
if ( x == BIG_LEFT )
{
lduty = 55 ; rduty = 40 ; dtime = 25 ;
}
/* update motor parameters */
update_motor();
delay_ms( dtime );
if ( x == ALL_BLACK )
{
state = MD_CHANGE ; *(dir+0) = DIR_CENTER ;
}
return state ;
}
UBYTE execute_change(UBYTE x)
{
UBYTE state ;
UBYTE dtime ;
/* default */
dtime = 50 ;
state = MD_CHANGE ;
/* turn */
if ( *(dir+0) == DIR_LEFT )
{
lduty = 35 ; rduty = 55 ;
}
if ( *(dir+0) == DIR_RIGHT )
{
lduty = 55 ; rduty = 35 ;
}
/* update motor parameters */
update_motor();
delay_ms( dtime );
/* straight */
lduty = 30 ;
rduty = 30 ;
/* update motor parameters */
update_motor();
delay_ms( dtime );
/* turn */
if ( x == ALL_BLACK ) {
if ( *(dir+0) == DIR_LEFT )
{
*(dir+1) = DIR_RIGHT ;
}
if ( *(dir+0) == DIR_RIGHT )
{
*(dir+1) = DIR_LEFT ;
}
}
return 0;
}
UBYTE execute_blind(UBYTE x)
{
UBYTE state ;
UBYTE dtime ;
/* default */
dtime = 50 ;
state = MD_BLIND ;
/* judge */
if ( x == CENTER ) {
if ( *(dir+1) == DIR_LEFT )
{
lduty = 25 ; rduty = 35 ;
}
if ( *(dir+1) == DIR_RIGHT )
{
lduty = 35 ; rduty = 25 ;
}
/* update motor parameters */
update_motor();
delay_ms( dtime );
state = MD_NORMAL ;
} else {
lduty = 30 ; rduty = 30 ;
/* update motor parameters */
update_motor();
delay_ms( dtime );
}
return state ;
}
void send_duty(UBYTE which,UBYTE x)
{
/* clear */
GP3DAT = 0xff000000 ;
/* impress duty */
GP3DAT |= (x << 16);
/* send trigger */
if ( which ) { GP4DAT &= ~(1 << BLD); }
else { GP4DAT &= ~(1 << ALD); }
/* wait */
delay_100us(1);
/* send trigger */
if ( which ) { GP4DAT |= (1 << BLD); }
else { GP4DAT |= (1 << ALD); }
}
void update_motor(void)
{
/* send left duty */
send_duty(ON, lduty);
send_duty(OFF,rduty);
/* send trigger */
GP4DAT |= (1 << TRG);
/* wait */
delay_100us(1);
/* send trigger */
GP4DAT &= ~(1 << TRG);
}
UBYTE get_start(void)
{
return 0;
}
UBYTE get_sensor(void)
{
UBYTE result ;
result = GP2DAT & MASK0F ;
return result ;
}
RTOSを使う場合、以下とします。
#include "3052.h"
typedef unsigned char UBYTE ;
typedef unsigned short UWORD ;
typedef unsigned long ULONG ;
typedef signed char SBYTE ;
typedef signed short SWORD ;
#define NO 0
#define YES NO+1
typedef struct {
void (*tsk)(void);
UWORD wcount ;
} TCBP ;
#define TSK_ID_MAX 9
#define TSK_ID0 0
#define TSK_ID1 1
#define TSK_ID2 2
#define TSK_ID3 3
#define TSK_ID4 4
#define TSK_ID5 5
#define TSK_ID6 6
#define TSK_ID7 7
#define TSK_ID8 8
#define NORMAL TSK_ID1
#define CRANK TSK_ID2
#define ROTATE TSK_ID3
#define LANE TSK_ID4
#define CHANGE TSK_ID5
#define BLIND TSK_ID6
#define XDEBUG TSK_ID8
#define TTS_SUSPEND 0
#define TTS_WAIT TTS_SUSPEND+1
#define TTS_READY TTS_SUSPEND+2
TCBP tcb[TSK_ID_MAX];
/*----------------*/
/* user variables */
/*----------------*/
#define ITU1_AREG 24999
typedef union {
struct {
unsigned char B7:1;
unsigned char B6:1;
unsigned char B5:1;
unsigned char B4:1;
unsigned char B3:1;
unsigned char B2:1;
unsigned char B1:1;
unsigned char B0:1;
} BIT ;
unsigned char DR ;
} FLAGSP ;
FLAGSP xflags ;
ULONG timcnt ;
#define SFLAG xflags.BIT.B0
#define UFLAG xflags.BIT.B1
#define WFLAG xflags.BIT.B2
#define TFLAG xflags.BIT.B3
#define MFLAG xflags.BIT.B4
#define P1DDR P1.DDR
#define P1DR P1.DR.BYTE
#define P2DDR P2.DDR
#define P2DR P2.DR.BYTE
#define P3DDR P3.DDR
#define P3DR P3.DR.BYTE
#define P4DDR P4.DDR
#define P4DR P4.DR.BYTE
#define P5DDR P5.DDR
#define P5DR P5.DR.BYTE
#define P6DDR P6.DDR
#define P6DR P6.DR.BYTE
#define P8DDR P8.DDR
#define P8DR P8.DR.BYTE
#define P7DR P7.DR.BYTE
#define P9DDR P9.DDR
#define P9DR P9.DR.BYTE
#define PADDR PA.DDR
#define PADR PA.DR.BYTE
#define PBDDR PB.DDR
#define PBDR PB.DR.BYTE
#define MASKFFFF 0xffff
#define MASKFF 0xff
#define MASKCF 0xcf
#define MASK0F 0x0f
#define MASK80 0x80
#define MASK03 0x03
#define OFF 0
#define ON OFF+1
#define MASKF0 0xf0
#define CLOSED 0
#define OPENED CLOSED+1
#define DIR_CENTER 0
#define DIR_RIGHT 1
#define DIR_LEFT 2
UBYTE sgate ;
UBYTE timeoutcnt ;
UBYTE dir[2] ;
UBYTE left ;
UBYTE right ;
UBYTE state ;
UBYTE mstate ;
UBYTE mode ;
UBYTE sloapf ;
UBYTE sloapr ;
UBYTE sloap ;
UBYTE sloapt[3] ;
UBYTE xcnt3 ;
UBYTE xcnt5 ;
UBYTE xcnt6 ;
UBYTE normal_l[13] ;
UBYTE normal_r[13] ;
UBYTE crank_l[13] ;
UBYTE crank_r[13] ;
UBYTE lane_l[13] ;
UBYTE lane_r[13] ;
UBYTE run_tsk ;
UWORD ready ;
UWORD suspend ;
UWORD waitq ;
UWORD bpat[16] ;
#define ALL_BLACK 0
#define ALL_WHITE 1
#define LEFT_WHITE 2
#define RIGHT_WHITE 3
#define CENTER 4
#define TINY_RIGHT 5
#define RIGHT 6
#define BIG_RIGHT 7
#define TINY_LEFT 8
#define LEFT 9
#define BIG_LEFT 10
#define BOTH_WHITE 11
#define ILLEAGAL 12
#define GEAR0 10
#define GEAR5 150
#define GEAR10 300
#define GEAR15 450
#define GEAR20 600
#define GEAR25 750
#define GEAR30 900
#define GEAR35 1050
#define GEAR40 1200
#define GEAR45 1350
#define GEAR50 1500
#define GEAR55 1650
#define GEAR60 1800
#define GEAR65 1950
#define GEAR70 2100
#define GEAR75 2250
#define GEAR80 2400
#define GEAR85 2550
#define GEAR90 2700
#define GEAR95 2850
#define GEAR100 2999
#define IDLE 0
#define RUN IDLE+1
#define SGATE_BIT 4
#define EDC_BIT 1
void init_sci_1(TBaudRate x);
void rs1_putchar(UBYTE x);
void rs1_crlf(void);
void rs1_puts(UBYTE *x);
void show_help(void);
UBYTE sindex ;
UBYTE sbuf[16];
UBYTE cmd ;
UBYTE asc_hex[16] = {'0','1','2','3','4','5','6','7','8','9','A','B','C','D','E','F'} ;
/*--------------------------------*/
/* Insert user functions protoype */
/*--------------------------------*/
void init_usr(void);
void init_timer1(void);
void init_table(void);
UBYTE get_hex(UBYTE x);
void delay_ms(UWORD x);
void binary_display(UBYTE x);
UWORD conv_value(UBYTE x);
UBYTE get_swx(void);
void send_motor_power(UBYTE x);
/*-------------*/
/* system call */
/*-------------*/
void cre_tsk(UBYTE tid,void (*tsk)(void));
void rsm_tsk(UBYTE tid);
void sus_tsk(UBYTE tid);
void slp_tsk(void);
void wai_tsk(UWORD x);
void init_os(void);
void timer_handler(void);
UBYTE is_tsk_ready(UBYTE tid);
/*------*/
/* task */
/*------*/
void tsk0_proc(void);
void tsk1_proc(void);
void tsk2_proc(void);
void tsk3_proc(void);
void tsk4_proc(void);
void tsk5_proc(void);
void tsk6_proc(void);
void tsk7_proc(void);
void tsk8_proc(void);
/*------*/
/* main */
/*------*/
int main(void)
{
TCBP pcur_tsk ;
/* disable interrupt */
DI ;
/* initialize */
init_usr();
/* initialize monitor */
init_os();
/* enable interrupt */
EI ;
/* opening message */
rs1_puts("Hello");
rs1_crlf();
/* endless loop */
run_tsk = TSK_ID0 ;
while ( ON ) {
/* RTOS */
pcur_tsk = tcb[run_tsk] ;
if ( is_tsk_ready( run_tsk ) ) { (*(pcur_tsk.tsk))(); }
run_tsk++;
if ( run_tsk == TSK_ID_MAX ) { run_tsk = TSK_ID0 ; }
/* 10ms handling */
if ( WFLAG == ON ) {
WFLAG = OFF ;
timer_handler();
}
}
return 0 ;
}
/*-----------------------*/
/* Insert user functions */
/*-----------------------*/
void init_usr(void)
{
/* PORT 4 */
P4DR = 0x00 ;
P4DDR = MASKFF ; /* all outputs */
/* PORT 6 */
P6DR = 0x00 ;
P6DDR = 0x00 ; /* all inputs */
/* PORT A */
PADR = 0 ;
PADDR = MASKFF ; /* all outputs */
/* PORT B */
PBDR = 0xc0 ;
PBDDR = 0xcf ; /* PB5,PB4 are inputs , others are outputs */
/* initialize */
init_timer1();
/* clear flags */
xflags.DR = 0 ;
/* initialize PWM */
{
ITU.TSTR.BIT.STR3 = (UBYTE)0x00; /* Stop the counter */
ITU.TOER.BYTE = (UBYTE)0x00;
ITU3.TCR.BYTE = (UBYTE)0xa0;
ITU3.TCNT = (UWORD)0x00;
ITU.TFCR.BYTE = (UBYTE)0xf6;
ITU3.GRA = (UWORD)3000;
ITU4.GRA = (UWORD)GEAR0;
ITU3.GRB = (UWORD)GEAR0;
}
/* start PWM */
{
ITU.TOER.BYTE = (UBYTE)0xff;
ITU.TSTR.BIT.STR3 = (UBYTE)0x01;
ITU3.BRB = (UWORD)GEAR10;
ITU4.BRA = (UWORD)GEAR10;
}
/* clear SCI buffer */
*(sbuf+0) = 0 ;
sindex = 0 ;
/* initialize */
timcnt = 0 ;
xcnt3 = 0 ;
xcnt5 = 0 ;
xcnt6 = 0 ;
/* SCI */
init_sci_1(br9600);
/* others */
init_table();
left = 0 ;
right = 0 ;
state = IDLE ;
mstate = 0 ;
sloap = 0 ;
sloapf = 0 ;
sloapr = 0 ;
*(sloapt+0) = 100 ;
*(sloapt+1) = 120 ;
*(sloapt+2) = 80 ;
}
void init_timer1(void)
{
/* stop timer */
ITU.TSTR.BIT.STR1 = OFF ;
/* TOER : Timer Output Enable Register
7 **** -> 0
6 **** -> 0
5 EXB4 -> 0
4 EXA4 -> 0
3 EB3 -> 0
2 EB4 -> 0
1 EA4 -> 0
0 EA3 -> 0
*/
ITU.TOER.BYTE = 0 ;
/* TIOR : Timer I/O Control Register
7 **** -> 0
6 IOB2 -> 0 GRB is not output compare match register
5 IOB1 -> 0
4 IOB0 -> 0
3 **** -> 0
2 IOA2 -> 0 GRA is not output compare match register
1 IOA1 -> 0
0 IOA0 -> 0
*/
ITU1.TIOR.BYTE = 0 ;
/* TCR : Timer Control Register
7 **** -> 0
6 CCLR1 -> 0 clear TCNT if GRA = TCNT
5 CCLR0 -> 1
4 CKEG1 -> 0 rising edge
3 CKEG0 -> 0
2 TPSC2 -> 0 φ利用
1 TPSC1 -> 0
0 TPSC0 -> 0
*/
ITU1.TCR.BYTE = 0x20 ;
/* TIER : Timer Interrupt Enable Register
7 **** -> 0
6 *** -> 0
5 *** -> 0
4 *** -> 0
3 *** -> 0
2 OVIE -> 0
1 IMIEB -> 0
0 IMIEA -> 1 select compare match interrupt
*/
ITU1.TIER.BIT.IMIEA = ON ;
/* reference */
ITU1.GRA = ITU1_AREG ;
ITU1.GRB = MASKFFFF ;
/* counter */
ITU1.TCNT = 0 ;
/* start timer */
ITU.TSTR.BIT.STR1 = ON ;
}
/*+++++++++++++++++++++++++++++++++++++*/
/* ITU1 interrupt with compare match A */
/* 1ms interval */
/*+++++++++++++++++++++++++++++++++++++*/
void int_imia1(void)
{
UBYTE dummy ;
/* clear flag */
dummy = ITU1.TSR.BIT.IMFA ;
ITU1.TSR.BIT.IMFA = OFF ;
/* increment */
timcnt++ ;
/* judge 10ms passed */
if ( timcnt & 10 ) { WFLAG = ON ; }
/* judge 1000ms passed */
if ( (timcnt & 1023) == 100 ) {
timeoutcnt++ ;
}
}
/*+++++++++++++++++++++++++*/
/* SCI_1 receive interrupt */
/*+++++++++++++++++++++++++*/
void init_sci_1(TBaudRate x)
{
volatile UWORD i;
/* SCR : Serial Control Register
7 bit TIE -> 0 Transmit Interrupt Enable(disable)
6 bit RIE -> 0 Receive Interrupt Enable(disable)
5 bit TE -> 0 Transmit Enable(disable)
4 bit RE -> 0 Receive Enable(disable)
3 bit MPIE -> 0 Multi Processor Interrupt Enable(disable)
2 bit TEIE -> 0 Transmit End Interrupt Enable(disable)
1 bit CKE1 -> 0 Clock Source (Use Internal Baud Rate Generator)
0 bit CKE0 -> 0
*/
SCI1.SCR.BYTE = 0 ;
/* SMR : Serial Mode Register
7 bit C/nA -> 0 Communication Mode(Asynchronous)
6 bit CHR -> 0 data Charactor (8 bits)
5 bit PE -> 0 Parity Enable(disable)
4 bit O/nE -> 0 Parity Mode(even)
3 bit STOP -> 0 Stop Bit(1 bit)
2 bit MP -> 0 Multi Processor(disable)
1 bit CKS1 -> 0 Clock Source ( φ )
0 bit CKS0 -> 0
*/
SCI1.SMR.BYTE = 0 ;
/* data transfer speed */
SCI1.BRR = x ;
/* wait 1 frame */
for (i = 0; i < 3000 ; i++) ;
/* enable Transmmit and Receive with interrupt */
SCI1.SCR.BYTE = 0x70 ;
}
/*+++++++++++++++++++++++++*/
/* SCI_1 receive interrupt */
/*+++++++++++++++++++++++++*/
void int_rxi1(void)
{
volatile UBYTE ch,dummy ;
/* clear flag */
dummy = SCI1.SSR.BYTE ;
SCI1.SSR.BIT.RDRF = OFF ;
/* get a character */
ch = SCI1.RDR ;
/* store */
*(sbuf+sindex) = ch ;
sindex++ ;
/* check */
if ( ch == '\r' ) {
*(sbuf+sindex) = 0 ;
sindex = 0 ;
UFLAG = ON ;
}
}
/*+++++++++++++++*/
/* SCI_1 putchar */
/*+++++++++++++++*/
void rs1_putchar(UBYTE x)
{
/* wait data transfer */
while ( SCI1.SSR.BIT.TDRE == OFF ) ;
/* put */
SCI1.TDR = x ;
SCI1.SSR.BIT.TDRE = OFF ;
}
/*++++++++++++*/
/* SCI_1 puts */
/*++++++++++++*/
void rs1_puts(UBYTE *x)
{
while ( *x ) {
/* send 1 charactors */
rs1_putchar(*x);
x++ ;
}
}
/*++++++++++++*/
/* SCI_1 crlf */
/*++++++++++++*/
void rs1_crlf(void)
{
rs1_putchar('\r');
rs1_putchar('\n');
}
/*++++++++++++++++++++*/
/* SCI_1 command help */
/*++++++++++++++++++++*/
void show_help(void)
{
rs1_puts("? help") ; rs1_crlf();
rs1_puts("E enable") ; rs1_crlf();
rs1_puts("e disable") ; rs1_crlf();
}
void init_table(void)
{
/* NORMAL */
*(normal_l+ALL_BLACK) = 10 ; *(normal_r+ALL_BLACK) = 10 ;
*(normal_l+ALL_WHITE) = 30 ; *(normal_r+ALL_WHITE) = 30 ;
*(normal_l+LEFT_WHITE) = 30 ; *(normal_r+LEFT_WHITE) = 30 ;
*(normal_l+RIGHT_WHITE) = 30 ; *(normal_r+RIGHT_WHITE) = 30 ;
*(normal_l+CENTER) = 50 ; *(normal_r+CENTER) = 50 ;
*(normal_l+TINY_RIGHT) = 50 ; *(normal_r+TINY_RIGHT) = 55 ;
*(normal_l+RIGHT) = 50 ; *(normal_r+RIGHT) = 60 ;
*(normal_l+BIG_RIGHT) = 50 ; *(normal_r+BIG_RIGHT) = 70 ;
*(normal_l+TINY_LEFT) = 55 ; *(normal_r+TINY_LEFT) = 50 ;
*(normal_l+LEFT) = 60 ; *(normal_r+LEFT) = 50 ;
*(normal_l+BIG_LEFT) = 70 ; *(normal_r+BIG_LEFT) = 50 ;
*(normal_l+BOTH_WHITE) = 20 ; *(normal_r+BOTH_WHITE) = 20 ;
*(normal_l+ILLEAGAL) = 10 ; *(normal_r+ILLEAGAL) = 10 ;
/* CRANK */
*(crank_l+ALL_BLACK) = 10 ; *(crank_r+ALL_BLACK) = 10 ;
*(crank_l+ALL_WHITE) = 25 ; *(crank_r+ALL_WHITE) = 25 ;
*(crank_l+LEFT_WHITE) = 25 ; *(crank_r+LEFT_WHITE) = 25 ;
*(crank_l+RIGHT_WHITE) = 25 ; *(crank_r+RIGHT_WHITE) = 25 ;
*(crank_l+CENTER) = 30 ; *(crank_r+CENTER) = 30 ;
*(crank_l+TINY_RIGHT) = 30 ; *(crank_r+TINY_RIGHT) = 35 ;
*(crank_l+RIGHT) = 30 ; *(crank_r+RIGHT) = 40 ;
*(crank_l+BIG_RIGHT) = 30 ; *(crank_r+BIG_RIGHT) = 45 ;
*(crank_l+TINY_LEFT) = 35 ; *(crank_r+TINY_LEFT) = 30 ;
*(crank_l+LEFT) = 40 ; *(crank_r+LEFT) = 30 ;
*(crank_l+BIG_LEFT) = 45 ; *(crank_r+BIG_LEFT) = 30 ;
*(crank_l+BOTH_WHITE) = 20 ; *(crank_r+BOTH_WHITE) = 20 ;
*(crank_l+ILLEAGAL) = 10 ; *(crank_r+ILLEAGAL) = 10 ;
/* LANE */
*(lane_l+ALL_BLACK) = 10 ; *(lane_r+ALL_BLACK) = 10 ;
*(lane_l+ALL_WHITE) = 25 ; *(lane_r+ALL_WHITE) = 25 ;
*(lane_l+LEFT_WHITE) = 25 ; *(lane_r+LEFT_WHITE) = 25 ;
*(lane_l+RIGHT_WHITE) = 25 ; *(lane_r+RIGHT_WHITE) = 25 ;
*(lane_l+CENTER) = 30 ; *(lane_r+CENTER) = 30 ;
*(lane_l+TINY_RIGHT) = 30 ; *(lane_r+TINY_RIGHT) = 35 ;
*(lane_l+RIGHT) = 30 ; *(lane_r+RIGHT) = 40 ;
*(lane_l+BIG_RIGHT) = 30 ; *(lane_r+BIG_RIGHT) = 45 ;
*(lane_l+TINY_LEFT) = 35 ; *(lane_r+TINY_LEFT) = 30 ;
*(lane_l+LEFT) = 40 ; *(lane_r+LEFT) = 30 ;
*(lane_l+BIG_LEFT) = 45 ; *(lane_r+BIG_LEFT) = 30 ;
*(lane_l+BOTH_WHITE) = 20 ; *(lane_r+BOTH_WHITE) = 20 ;
*(lane_l+ILLEAGAL) = 10 ; *(lane_r+ILLEAGAL) = 10 ;
}
UBYTE get_hex(UBYTE x)
{
UBYTE result ;
/* default */
result = 0 ;
/* convert */
if ( '0' <= x && x <= '9' ) { result = x - '0' ; }
if ( 'A' <= x && x <= 'F' ) { result = x - 'A' + 10 ; }
if ( 'a' <= x && x <= 'f' ) { result = x - 'a' + 10 ; }
return result ;
}
void delay_ms(UWORD x)
{
ULONG target ;
/* calculate last value */
target = timcnt + x ;
/* wait */
while ( timcnt < target ) ;
}
void binary_display(UBYTE x)
{
UBYTE loop ;
UBYTE bdat ;
/* show */
for ( loop = 0 ; loop < 8 ; loop++ ) {
bdat = '0' ;
if ( x & MASK80 ) { bdat++ ; }
rs1_putchar( bdat );
x <<= 1 ;
}
}
UWORD conv_value(UBYTE x)
{
UWORD result ;
/* convert */
switch ( x ) {
case 5 : result = GEAR5 ; break ;
case 10 : result = GEAR10 ; break ;
case 15 : result = GEAR15 ; break ;
case 20 : result = GEAR20 ; break ;
case 25 : result = GEAR25 ; break ;
case 30 : result = GEAR30 ; break ;
case 35 : result = GEAR35 ; break ;
case 40 : result = GEAR40 ; break ;
case 45 : result = GEAR45 ; break ;
case 50 : result = GEAR50 ; break ;
case 55 : result = GEAR55 ; break ;
case 60 : result = GEAR60 ; break ;
case 65 : result = GEAR65 ; break ;
case 70 : result = GEAR70 ; break ;
case 75 : result = GEAR75 ; break ;
case 80 : result = GEAR80 ; break ;
case 85 : result = GEAR85 ; break ;
case 90 : result = GEAR90 ; break ;
case 95 : result = GEAR95 ; break ;
case 100 : result = GEAR100 ; break ;
default : result = GEAR0 ; break ;
}
return result ;
}
void send_dc(UBYTE lx,UBYTE rx)
{
UWORD left ;
UWORD right ;
/* convert */
left = conv_value( lx );
right = conv_value( rx );
/* store */
ITU3.BRB = (UWORD)left;
ITU4.BRA = (UWORD)right;
}
UBYTE get_sensor(void)
{
UBYTE result ;
/* get information from PORT7 lower nibble */
result = P7DR ;
/* masking */
result &= MASK0F ;
return result ;
}
UBYTE get_start(void)
{
return sgate;
}
void show_state(UBYTE x)
{
UBYTE result;
/* generate code */
result = (1 << x);
/* impress */
P4DR = result ^ MASKFF ;
}
UBYTE get_swx(void)
{
UBYTE tmp ;
/* get switch state */
tmp = P6DR ^ MASKF0 ;
/* shift */
tmp >>= 4 ;
return tmp ;
}
void send_motor_power(UBYTE x)
{
if ( x == ON ) { PBDR |= (1 << EDC_BIT); }
else { PBDR &= ~(1 << EDC_BIT); }
}
/* system call */
void cre_tsk(UBYTE tid,void (*tsk)(void))
{
tcb[tid].tsk = tsk;
tcb[tid].wcount = 0;
}
void sta_tsk(UBYTE tid,UBYTE tst)
{
UWORD xtmp ;
xtmp = (1 << tid) ;
if ( tst == TTS_READY ) { ready |= xtmp ; }
if ( tst == TTS_SUSPEND ) { suspend |= xtmp ; }
if ( tst == TTS_WAIT ) { waitq |= xtmp ; }
}
void rsm_tsk(UBYTE tid)
{
UWORD tmp ;
UWORD tmpx ;
/* get bit pattern */
tmp = *(bpat+tid);
tmpx = tmp ^ MASKFFFF ;
/* bit operation */
ready |= tmp;
suspend &= tmpx;
waitq &= tmpx;
}
void sus_tsk(UBYTE tid)
{
UWORD tmp ;
UWORD tmpx ;
/* get bit pattern */
tmp = *(bpat+tid);
tmpx = tmp ^ MASKFFFF ;
/* bit operation */
ready &= tmpx;
suspend |= tmp ;
waitq &= tmpx;
}
void slp_tsk(void)
{
sus_tsk(run_tsk);
}
void wai_tsk(UWORD x)
{
UWORD tmp ;
UWORD tmpx ;
/* get bit pattern */
tmp = *(bpat+run_tsk);
tmpx = tmp ^ MASKFFFF ;
/* bit operation */
ready &= tmpx;
suspend &= tmpx;
waitq |= tmp ;
/* update counter */
tcb[run_tsk].wcount = x ;
}
void init_os(void)
{
UBYTE i;
/* initialize queue */
ready = 0;
suspend = 0;
waitq = 0;
/* initalize pattern */
for ( i = 0 ; i < 16 ; i++ ) { *(bpat+i) = (1 << i) ; }
/* create task */
cre_tsk(TSK_ID0,tsk0_proc); cre_tsk(NORMAL ,tsk1_proc);
cre_tsk(CRANK ,tsk2_proc); cre_tsk(ROTATE ,tsk3_proc);
cre_tsk(LANE ,tsk4_proc); cre_tsk(CHANGE ,tsk5_proc);
cre_tsk(BLIND ,tsk6_proc); cre_tsk(TSK_ID7,tsk7_proc);
cre_tsk(XDEBUG ,tsk8_proc);
/* start task state */
sta_tsk(TSK_ID0,TTS_READY) ; sta_tsk(TSK_ID1,TTS_SUSPEND);
sta_tsk(TSK_ID2,TTS_SUSPEND); sta_tsk(TSK_ID3,TTS_SUSPEND);
sta_tsk(TSK_ID4,TTS_SUSPEND); sta_tsk(TSK_ID5,TTS_SUSPEND);
sta_tsk(TSK_ID6,TTS_SUSPEND); sta_tsk(TSK_ID7,TTS_READY);
sta_tsk(TSK_ID8,TTS_READY) ;
}
void timer_handler(void)
{
UBYTE i ;
for ( i = 0 ; i < TSK_ID_MAX ; i++ ) {
/* judge WAIT state */
if ( waitq & *(bpat+i) ) {
tcb[i].wcount-- ;
if ( tcb[i].wcount == 0 ) { rsm_tsk(i); }
}
}
}
UBYTE is_tsk_ready(UBYTE tid)
{
return( ready & *(bpat+tid) ) ;
}
/* system control */
void tsk0_proc(void)
{
/* debug run */
mode = get_swx() ;
if ( mode & 0x08 ) {
/* set flag */
MFLAG = ON ;
/* get mode */
mode &= 7 ;
/* change state */
state = RUN ;
/* crank */
if ( mode == 2 ) { rsm_tsk(CRANK); }
/* rotate */
if ( mode == 3 ) { rsm_tsk(ROTATE); }
/* lane */
if ( mode == 4 ) { rsm_tsk(LANE); }
/* change */
if ( mode == 5 ) { rsm_tsk(CHANGE); }
/* blind */
if ( mode == 6 ) { rsm_tsk(BLIND); }
/* enable motor power */
send_motor_power(ON);
/* timer trigger clear */
timeoutcnt = 0 ;
TFLAG = OFF ;
}
/* start trigger */
if ( state == IDLE ) {
if ( get_start() == OPENED ) {
state = RUN ;
rsm_tsk(NORMAL);
/* enable motor power */
send_motor_power(ON);
/* timer trigger clear */
timeoutcnt = 0 ;
TFLAG = OFF ;
}
}
/* timeout */
if ( state == RUN ) {
if ( TFLAG == ON ) {
state = IDLE ;
/* suspend move handling task */
state = IDLE ;
sus_tsk(NORMAL);
sus_tsk(CRANK);
sus_tsk(ROTATE);
sus_tsk(LANE);
sus_tsk(CHANGE);
sus_tsk(BLIND);
/* machine state */
mstate = 0 ;
/* disable motor power */
send_motor_power(OFF);
}
}
/* show state */
show_state( mstate );
}
/* NORMAL */
void tsk1_proc(void)
{
UBYTE xmul ;
UBYTE flag ;
UBYTE xsensor ;
/* default */
flag = OFF ;
/* show state */
mstate = 1 ;
show_state( mstate );
/* get sensor */
xsensor = get_sensor();
/* update motor duty ratio */
left = *(normal_l+xsensor);
right = *(normal_r+xsensor);
/* default */
*(dir+0) = DIR_CENTER ;
*(dir+1) = DIR_CENTER ;
/* get sensor */
if ( xsensor == CENTER ) {
/* climb hill or down hill */
if ( sloap ) {
xmul = *(sloapt+sloap) ;
left = (UBYTE)( xmul * left * 1.0 / 100 );
right = (UBYTE)( xmul * right * 1.0 / 100 );
}
}
/* update */
send_dc(left,right);
/* judge */
if ( xsensor == ALL_WHITE ) {
rsm_tsk(CRANK);
flag = ON ;
}
if ( xsensor == LEFT_WHITE ) {
*(dir+0) = DIR_LEFT ;
*(dir+1) = DIR_RIGHT ;
rsm_tsk(LANE);
flag = ON ;
}
if ( xsensor == RIGHT_WHITE ) {
*(dir+0) = DIR_RIGHT ;
*(dir+0) = DIR_LEFT ;
rsm_tsk(LANE);
flag = ON ;
}
/* cyclic */
if ( flag == ON ) {
flag = OFF ;
slp_tsk();
} else {
wai_tsk( 10 );
}
}
/* CRANK */
void tsk2_proc(void)
{
UBYTE flag ;
UBYTE xsensor ;
/* default */
flag = OFF ;
/* show state */
mstate = 2 ;
show_state( mstate );
/* get sensor */
xsensor = get_sensor();
/* update motor duty ratio */
left = *(crank_l+xsensor);
right = *(crank_r+xsensor);
/* update */
send_dc(left,right);
/* judge */
if ( xsensor == LEFT_WHITE ) {
*(dir+0) = DIR_LEFT ;
*(dir+1) = DIR_RIGHT ;
}
if ( xsensor == RIGHT_WHITE ) {
*(dir+0) = DIR_RIGHT ;
*(dir+1) = DIR_LEFT ;
}
if ( xsensor == ALL_BLACK ) {
/* initialize sequence counter */
xcnt3 = 0 ;
/* update state */
rsm_tsk(ROTATE);
flag = ON ;
}
/* cyclic */
if ( flag == ON ) {
flag = OFF ;
slp_tsk();
} else {
wai_tsk( 100 );
}
}
/* ROTATE */
void tsk3_proc(void)
{
UBYTE flag ;
UBYTE xsensor ;
/* default */
flag = OFF ;
/* show state */
mstate = 3 ;
show_state( mstate );
/* get sensor */
xsensor = get_sensor();
/* sequence */
switch ( xcnt3 ) {
/* rotate */
case 0 :
xcnt3 = 1 ;
left = 50 ; right = 10 ;
if ( *(dir+0) == DIR_RIGHT ) {
left = 10 ; right = 50 ;
}
break ;
/* judge */
case 1 :
xcnt3 = 1 ;
if ( xsensor == CENTER ) {
left = 30 ; right = 30 ;
xcnt3 = 2 ;
}
break ;
/* straight and move */
case 2 :
xcnt3 = 3 ;
break ;
/* exit */
case 3 :
rsm_tsk(NORMAL);
flag = ON ;
break ;
/* others */
default:
break;
}
/* update */
send_dc(left,right);
/* cyclic */
if ( flag == ON ) {
xcnt3 = 0 ;
flag = OFF ;
slp_tsk();
} else {
wai_tsk( 100 );
}
}
/* LANE */
void tsk4_proc(void)
{
UBYTE flag ;
UBYTE xsensor ;
/* default */
flag = OFF ;
/* show state */
mstate = 4 ;
show_state( mstate );
/* get sensor */
xsensor = get_sensor();
/* update motor duty ratio */
left = *(lane_l+xsensor) ;
right = *(lane_r+xsensor) ;
/* update */
send_dc(left,right);
/* judge */
if ( xsensor == ALL_BLACK ) {
/* initialize sequence counter */
xcnt5 = 0 ;
/* update state */
rsm_tsk(CHANGE);
flag = ON ;
}
if ( xsensor == LEFT_WHITE ) {
*(dir+0) = DIR_LEFT ;
*(dir+1) = DIR_RIGHT ;
}
if ( xsensor == RIGHT_WHITE ) {
*(dir+0) = DIR_RIGHT ;
*(dir+1) = DIR_LEFT ;
}
/* cyclic */
if ( flag == ON ) {
flag = OFF ;
slp_tsk();
} else {
wai_tsk( 10 );
}
}
/* CHANGE */
void tsk5_proc(void)
{
UBYTE flag ;
/* default */
flag = OFF ;
/* show state */
mstate = 5 ;
show_state( mstate );
/* sequence */
switch ( xcnt5 ) {
/* rotate */
case 0 :
xcnt5 = 1 ;
/* set rotate direction */
left = 50 ; right = 30 ;
if ( *(dir+0) == DIR_LEFT ) {
left = 30 ; right = 50 ;
}
break ;
/* straight */
case 1 :
xcnt5 = 2 ;
left = 30 ; right = 30 ;
break ;
/* move */
case 2 :
xcnt5 = 3 ;
break ;
/* exit */
case 3 :
rsm_tsk(BLIND);
flag = ON ;
break ;
/* others */
default:
break;
}
/* update */
send_dc(left,right);
/* cyclic */
if ( flag == ON ) {
flag = OFF ;
xcnt5 = 0 ;
xcnt6 = 0 ;
slp_tsk();
} else {
wai_tsk( 10 );
}
}
/* BLIND */
void tsk6_proc(void)
{
UBYTE flag ;
UBYTE xsensor ;
/* default */
flag = OFF ;
/* show state */
mstate = 6 ;
show_state( mstate );
/* get sensor */
xsensor = get_sensor();
/* sequence */
switch ( xcnt6 ) {
/* straight */
case 0 :
xcnt6 = 1 ;
left = 30 ; right = 30 ;
break ;
/* judge and move */
case 1 :
xcnt6 = 1 ;
if ( xsensor == CENTER ) { xcnt6 = 2 ; }
if ( xsensor == TINY_LEFT ) { xcnt6 = 2 ; }
if ( xsensor == TINY_RIGHT ) { xcnt6 = 2 ; }
break ;
/* rotate */
case 2 :
xcnt6 = 3 ;
/* set rotate direction */
left = 50 ; right = 30 ;
if ( *(dir+1) == DIR_LEFT ) {
left = 30 ; right = 50 ;
}
break ;
/* move */
case 3 :
xcnt6 = 4 ;
left = 30 ; right = 30 ;
break ;
/* exit */
case 4 :
rsm_tsk(NORMAL);
flag = ON ;
break ;
/* others */
default:
break;
}
/* update */
send_dc(left,right);
/* cyclic */
if ( flag == ON ) {
flag = OFF ;
xcnt6 = 0 ;
slp_tsk();
} else {
wai_tsk( 10 );
}
}
/* sensing */
void tsk7_proc(void)
{
UBYTE stmp ;
UBYTE xsensor ;
/* get sensor data */
xsensor = P7DR ;
/* start gate */
sgate = CLOSED ;
if ( !(xsensor & (1 << SGATE_BIT)) ) { sgate = OPENED ; }
/* sloap */
sloapf <<= 1 ; sloapf &= MASK03 ;
sloapr <<= 1 ; sloapr &= MASK03 ;
if ( xsensor & 0x40 ) { sloapr |= ON ; }
if ( xsensor & 0x80 ) { sloapf |= ON ; }
sloap = 0 ;
if ( sloapf == 3 ) { sloap |= 1 ; }
if ( sloapr == 3 ) { sloap |= 2 ; }
/* time out */
if ( timeoutcnt > 119 ) { TFLAG = ON ; }
/* wait 50ms */
wai_tsk(5);
}
/* execute debug */
void tsk8_proc(void)
{
if ( UFLAG == ON ) {
/* clear */
UFLAG = OFF ;
/* new line */
rs1_crlf();
/* command interpreter */
cmd = *(sbuf+0) ;
/* help */
if ( cmd == '?' ) { show_help() ; }
/* enable DCDC conveter */
if ( cmd == 'E' ) { send_motor_power(ON); }
/* disable DCDC conveter */
if ( cmd == 'e' ) { send_motor_power(OFF); }
}
}
左右の回転数の差が0.5であれば、回転角度は45度程度。
マシンが走行している状態で、45度という回転角度は
スピンするくらいの大きな力をかけることになります。
スピンしないでラインを追従するには、回転数の差が
0.01から0.2程度にするとわかります。
車速感応制御で、滑らかなに走行させることも考えて
おかないと。
回転数の差を求めるには、ロータリーエンコーダを使うことが
知られていますが、モータに流れる電流値で回転数を算出する
ことも可能。メカに制約がある場合、電流値による回転数算出
を利用することに。
ここまでで大まかな処理を決めたので、APIを利用してトップレベル
のコードを作成します。
int main(void)
{
/* initialize */
init_usr();
/* detect start gate state */
sgate = get_start();
while ( sgate == CLOSED ) {
/* delay 100ms */
delay_ms(100);
/* get start gate state */
sgate = get_start();
}
/* endless loop */
while ( ON ) {
/* get sensor state */
sensor = get_sensor();
/* judge mode */
switch ( mode ) {
case MD_NORMAL : mode = execute_normal(sensor); break ;
case MD_CRANK : mode = execute_crank(sensor) ; break ;
case MD_ROTATE : mode = execute_rotate(sensor); break ;
case MD_LANE : mode = execute_lane(sensor); break ;
case MD_CHANGE : mode = execute_change(sensor); break ;
case MD_BLIND : mode = execute_blind(sensor); break ;
default : break ;
}
/* delay 100ms */
delay_ms(100);
}
/* dummy */
return 0 ;
}
トップレベルの処理から展開していくと以下。
#include <ADuC7026.h>
#define OFF 0
#define ON OFF+1
#define NO 0
#define YES NO+1
/* data definitions */
typedef unsigned char UBYTE ;
typedef signed char SBYTE ;
typedef unsigned short UWORD ;
typedef signed short SWORD ;
typedef unsigned long ULONG ;
typedef signed long SLONG ;
void IRQ_Handler(void) __irq;
void init_usr(void);
/*--------------------*/
/* function prototype */
/*--------------------*/
void delay_100us(UWORD x);
void delay_ms(UWORD x);
/*---------------*/
/* FPGA handling */
/*---------------*/
UBYTE execute_normal(UBYTE x);
UBYTE execute_crank(UBYTE x);
UBYTE execute_rotate(UBYTE x);
UBYTE execute_lane(UBYTE x);
UBYTE execute_change(UBYTE x);
UBYTE execute_blind(UBYTE x);
UBYTE get_start(void);
UBYTE get_sensor(void);
void send_duty(UBYTE which,UBYTE x);
void update_motor(void);
/* global variables */
volatile ULONG timcnt ;
volatile UBYTE lduty ;
volatile UBYTE rduty ;
volatile UBYTE dir[2] ;
#define MD_NONE 0
#define MD_NORMAL MD_NONE+1
#define MD_CRANK MD_NONE+2
#define MD_ROTATE MD_NONE+3
#define MD_LANE MD_NONE+4
#define MD_CHANGE MD_NONE+5
#define MD_BLIND MD_NONE+6
#define ALL_BLACK 0
#define ALL_WHITE 1
#define LEFT_WHITE 2
#define RIGHT_WHITE 3
#define CENTER 4
#define TINY_RIGHT 5
#define RIGHT 6
#define BIG_RIGHT 7
#define TINY_LEFT 8
#define LEFT 9
#define BIG_LEFT 10
#define BOTH_WHITE 11
#define ILLEAGAL 12
#define TRG 18
#define BLD 17
#define ALD 16
#define MASK0F 0x0f
#define DIR_CENTER 0
#define DIR_RIGHT DIR_CENTER+1
#define DIR_LEFT DIR_CENTER+2
#define CLOSED 0
#define OPENED CLOSED+1
volatile UBYTE sgate ;
volatile UBYTE sensor ;
volatile UBYTE mode ;
void main(void)
{
/* initialize */
init_usr();
/* detect start gate state */
while ( sgate == CLOSED ) {
/* delay 100ms */
delay_ms(100);
/* get start gate state */
sgate = get_start();
}
/* endless loop */
while ( ON ) {
/* get sensor state */
sensor = get_sensor();
/* judge mode */
switch ( mode ) {
case MD_NORMAL : mode = execute_normal(sensor); break ;
case MD_CRANK : mode = execute_crank(sensor) ; break ;
case MD_ROTATE : mode = execute_rotate(sensor); break ;
case MD_LANE : mode = execute_lane(sensor); break ;
case MD_CHANGE : mode = execute_change(sensor); break ;
case MD_BLIND : mode = execute_blind(sensor); break ;
default : break ;
}
/* delay 100ms */
delay_ms(100);
}
}
void IRQ_Handler(void) __irq
{
/* judge timer0 interruption (100us) */
if ( (IRQSTA & RTOS_TIMER_BIT) == RTOS_TIMER_BIT ) {
/* clear timer0 interrupt flag */
T0CLRI = 0xff ;
/* increment */
timcnt++ ;
/* judge */
if ( (timcnt & 0xfff) == 0 ) { GP4DAT ^= (1 << 23); }
}
}
void init_usr(void)
{
/* select clock 10.44MHz
initialized in start up routine
*/
PLLKEY1 = 0xaa ;
PLLCON = 0x01 ;
PLLKEY2 = 0x55 ;
/* power control
initialized in start up routine
*/
/* initialize UART */
{
/* set baud rate 19200 bps CD = 2 */
COMCON0 = 0x80 ; /* select COMDIV1 and COMDIV0 */
COMDIV0 = 0x11 ;
COMDIV1 = 0x00 ;
/* set conditions */
COMCON0 = 0x03 ; /* select COMRX and COMTX , 8bit data , 1 stop bit , no parity */
/* enable interrupt */
COMIEN0 = 0x01 ; /* ERBFI */
}
/* P0 */
{
/* use GPIO */
GP0CON = 0x00000000 ;
/* */
GP0DAT = 0xDF1F0000 ;
}
/* P1 */
{
/* use UART */
GP1CON = 0x00000011 ;
/* */
GP1DAT = 0xfef00000 ;
}
/* P2 */
{
/* all bits inputs */
GP2DAT = 0x00000000 ;
}
/* P3 */
{
/* all bits outputs */
GP3DAT = 0xff000000 ;
}
/* P4 */
{
/* all bits outputs */
GP4DAT = 0xff030000 ;
}
/* initialize timer 0 (10kHz) */
{
T0LD = 1044 ; /* (10.44MHz / 1) / 10kHz */
T0CON = 0xc0 ; /* enable , cyclic , 1/1 */
}
timcnt = 0 ;
lduty = 0 ;
rduty = 0 ;
update_motor();
mode = MD_NONE ;
sgate = CLOSED ;
/* enable timer 0 interrupt */
IRQEN = RTOS_TIMER_BIT ;
}
void delay_100us(UWORD x)
{
ULONG last ;
/* calculate */
last = timcnt + x ;
/* wait */
while ( timcnt < last ) ;
}
void delay_ms(UWORD x)
{
ULONG last ;
/* calculate */
last = timcnt + 10 * x ;
/* wait */
while ( timcnt < last ) ;
}
UBYTE execute_normal(UBYTE x)
{
UBYTE state ;
UBYTE dtime ;
/* default */
lduty = 30 ;
rduty = 30 ;
dtime = 30 ;
state = MD_NORMAL ;
if ( x == ALL_BLACK )
{
lduty = 10 ; rduty = 10 ; dtime = 10 ;
}
if ( x == ALL_WHITE )
{
lduty = 30 ; rduty = 30 ; dtime = 30 ;
}
if ( x == LEFT_WHITE || x == RIGHT_WHITE || x == CENTER )
{
lduty = 50 ; rduty = 50 ; dtime = 30 ;
}
if ( x == TINY_RIGHT )
{
lduty = 50 ; rduty = 55 ; dtime = 25 ;
}
if ( x == RIGHT )
{
lduty = 50 ; rduty = 60 ; dtime = 25 ;
}
if ( x == BIG_RIGHT )
{
lduty = 50 ; rduty = 70 ; dtime = 25 ;
}
if ( x == TINY_LEFT )
{
lduty = 55 ; rduty = 50 ; dtime = 25 ;
}
if ( x == LEFT )
{
lduty = 60 ; rduty = 50 ; dtime = 25 ;
}
if ( x == BIG_LEFT )
{
lduty = 70 ; rduty = 50 ; dtime = 25 ;
}
if ( x == BOTH_WHITE )
{
lduty = 30 ; rduty = 30 ; dtime = 10 ;
}
/* update motor parameters */
update_motor();
delay_ms( dtime );
*(dir+0) = DIR_CENTER;
if ( x == ALL_WHITE )
{
state = MD_CRANK ;
}
if ( x == LEFT_WHITE )
{
state = MD_LANE ;
*(dir+0) = DIR_LEFT ;
}
if ( x == RIGHT_WHITE )
{
state = MD_LANE ;
*(dir+0) = DIR_RIGHT ;
}
return state;
}
UBYTE execute_crank(UBYTE x)
{
UBYTE state ;
UBYTE dtime ;
/* default */
lduty = 30 ;
rduty = 30 ;
dtime = 30 ;
if ( x == ALL_BLACK )
{
lduty = 10 ; rduty = 10 ; dtime = 10 ;
}
if ( x == ALL_WHITE )
{
lduty = 30 ; rduty = 30 ; dtime = 10 ;
}
if ( x == LEFT_WHITE )
{
lduty = 30 ; rduty = 30 ; dtime = 20 ;
}
if ( x == RIGHT_WHITE )
{
lduty = 30 ; rduty = 30 ; dtime = 20 ;
}
if ( x == CENTER )
{
lduty = 40 ; rduty = 40 ; dtime = 30 ;
}
if ( x == TINY_RIGHT )
{
lduty = 40 ; rduty = 45 ; dtime = 25 ;
}
if ( x == RIGHT )
{
lduty = 40 ; rduty = 50 ; dtime = 25 ;
}
if ( x == BIG_RIGHT )
{
lduty = 40 ; rduty = 55 ; dtime = 25 ;
}
if ( x == TINY_LEFT )
{
lduty = 45 ; rduty = 40 ; dtime = 25 ;
}
if ( x == LEFT )
{
lduty = 50 ; rduty = 40 ; dtime = 25 ;
}
if ( x == BIG_LEFT )
{
lduty = 55 ; rduty = 40 ; dtime = 25 ;
}
if ( x == BOTH_WHITE )
{
lduty = 30 ; rduty = 30 ; dtime = 20 ;
}
/* update motor parameters */
update_motor();
delay_ms( dtime );
state = MD_CRANK ;
*(dir+0) = DIR_CENTER;
if ( x == ALL_WHITE )
{
state = MD_CRANK ;
}
if ( x == LEFT_WHITE )
{
state = MD_LANE ;
*(dir+0) = DIR_LEFT ;
}
if ( x == RIGHT_WHITE )
{
state = MD_LANE ;
*(dir+0) = DIR_RIGHT ;
}
return state;
}
UBYTE execute_rotate(UBYTE x)
{
UBYTE state ;
UBYTE dtime ;
dtime = 30 ;
state = MD_ROTATE ;
if ( dir == DIR_LEFT )
{
lduty = 30 ; rduty = 50 ;
}
if ( dir == DIR_RIGHT )
{
lduty = 50 ; rduty = 30 ;
}
/* update motor parameters */
update_motor();
delay_ms( dtime );
if ( x == CENTER )
{
lduty = 30 ; rduty = 30 ; *(dir+0) = DIR_CENTER ; state = MD_NORMAL ;
}
return state;
}
UBYTE execute_lane(UBYTE x)
{
UBYTE state ;
UBYTE dtime ;
/* default */
lduty = 30 ;
rduty = 30 ;
dtime = 30 ;
state = MD_LANE ;
if ( x == ALL_BLACK )
{
lduty = 10 ; rduty = 10 ; dtime = 10 ;
}
if ( x == ALL_WHITE )
{
lduty = 30 ; rduty = 30 ; dtime = 10 ;
}
if ( x == LEFT_WHITE || x == RIGHT_WHITE )
{
lduty = 30 ; rduty = 30 ; dtime = 30 ;
}
if ( x == CENTER )
{
lduty = 40 ; rduty = 40 ; dtime = 30 ;
}
if ( x == TINY_RIGHT )
{
lduty = 40 ; rduty = 45 ; dtime = 25 ;
}
if ( x == RIGHT )
{
lduty = 40 ; rduty = 50 ; dtime = 25 ;
}
if ( x == BIG_RIGHT )
{
lduty = 40 ; rduty = 55 ; dtime = 25 ;
}
if ( x == TINY_LEFT )
{
lduty = 45 ; rduty = 40 ; dtime = 25 ;
}
if ( x == LEFT )
{
lduty = 50 ; rduty = 40 ; dtime = 25 ;
}
if ( x == BIG_LEFT )
{
lduty = 55 ; rduty = 40 ; dtime = 25 ;
}
/* update motor parameters */
update_motor();
delay_ms( dtime );
if ( x == ALL_BLACK )
{
state = MD_CHANGE ; *(dir+0) = DIR_CENTER ;
}
return state ;
}
UBYTE execute_change(UBYTE x)
{
UBYTE state ;
UBYTE dtime ;
/* default */
dtime = 50 ;
state = MD_CHANGE ;
/* turn */
if ( *(dir+0) == DIR_LEFT )
{
lduty = 35 ; rduty = 55 ;
}
if ( *(dir+0) == DIR_RIGHT )
{
lduty = 55 ; rduty = 35 ;
}
/* update motor parameters */
update_motor();
delay_ms( dtime );
/* straight */
lduty = 30 ;
rduty = 30 ;
/* update motor parameters */
update_motor();
delay_ms( dtime );
/* turn */
if ( x == ALL_BLACK ) {
if ( *(dir+0) == DIR_LEFT )
{
*(dir+1) = DIR_RIGHT ;
}
if ( *(dir+0) == DIR_RIGHT )
{
*(dir+1) = DIR_LEFT ;
}
}
return 0;
}
UBYTE execute_blind(UBYTE x)
{
UBYTE state ;
UBYTE dtime ;
/* default */
dtime = 50 ;
state = MD_BLIND ;
/* judge */
if ( x == CENTER ) {
if ( *(dir+1) == DIR_LEFT )
{
lduty = 25 ; rduty = 35 ;
}
if ( *(dir+1) == DIR_RIGHT )
{
lduty = 35 ; rduty = 25 ;
}
/* update motor parameters */
update_motor();
delay_ms( dtime );
state = MD_NORMAL ;
} else {
lduty = 30 ; rduty = 30 ;
/* update motor parameters */
update_motor();
delay_ms( dtime );
}
return state ;
}
void send_duty(UBYTE which,UBYTE x)
{
/* clear */
GP3DAT = 0xff000000 ;
/* impress duty */
GP3DAT |= (x << 16);
/* send trigger */
if ( which ) { GP4DAT &= ~(1 << BLD); }
else { GP4DAT &= ~(1 << ALD); }
/* wait */
delay_100us(1);
/* send trigger */
if ( which ) { GP4DAT |= (1 << BLD); }
else { GP4DAT |= (1 << ALD); }
}
void update_motor(void)
{
/* send left duty */
send_duty(ON, lduty);
send_duty(OFF,rduty);
/* send trigger */
GP4DAT |= (1 << TRG);
/* wait */
delay_100us(1);
/* send trigger */
GP4DAT &= ~(1 << TRG);
}
UBYTE get_start(void)
{
return 0;
}
UBYTE get_sensor(void)
{
UBYTE result ;
result = GP2DAT & MASK0F ;
return result ;
}
RTOSを使う場合、以下とします。
#include "3052.h"
typedef unsigned char UBYTE ;
typedef unsigned short UWORD ;
typedef unsigned long ULONG ;
typedef signed char SBYTE ;
typedef signed short SWORD ;
#define NO 0
#define YES NO+1
typedef struct {
void (*tsk)(void);
UWORD wcount ;
} TCBP ;
#define TSK_ID_MAX 9
#define TSK_ID0 0
#define TSK_ID1 1
#define TSK_ID2 2
#define TSK_ID3 3
#define TSK_ID4 4
#define TSK_ID5 5
#define TSK_ID6 6
#define TSK_ID7 7
#define TSK_ID8 8
#define NORMAL TSK_ID1
#define CRANK TSK_ID2
#define ROTATE TSK_ID3
#define LANE TSK_ID4
#define CHANGE TSK_ID5
#define BLIND TSK_ID6
#define XDEBUG TSK_ID8
#define TTS_SUSPEND 0
#define TTS_WAIT TTS_SUSPEND+1
#define TTS_READY TTS_SUSPEND+2
TCBP tcb[TSK_ID_MAX];
/*----------------*/
/* user variables */
/*----------------*/
#define ITU1_AREG 24999
typedef union {
struct {
unsigned char B7:1;
unsigned char B6:1;
unsigned char B5:1;
unsigned char B4:1;
unsigned char B3:1;
unsigned char B2:1;
unsigned char B1:1;
unsigned char B0:1;
} BIT ;
unsigned char DR ;
} FLAGSP ;
FLAGSP xflags ;
ULONG timcnt ;
#define SFLAG xflags.BIT.B0
#define UFLAG xflags.BIT.B1
#define WFLAG xflags.BIT.B2
#define TFLAG xflags.BIT.B3
#define MFLAG xflags.BIT.B4
#define P1DDR P1.DDR
#define P1DR P1.DR.BYTE
#define P2DDR P2.DDR
#define P2DR P2.DR.BYTE
#define P3DDR P3.DDR
#define P3DR P3.DR.BYTE
#define P4DDR P4.DDR
#define P4DR P4.DR.BYTE
#define P5DDR P5.DDR
#define P5DR P5.DR.BYTE
#define P6DDR P6.DDR
#define P6DR P6.DR.BYTE
#define P8DDR P8.DDR
#define P8DR P8.DR.BYTE
#define P7DR P7.DR.BYTE
#define P9DDR P9.DDR
#define P9DR P9.DR.BYTE
#define PADDR PA.DDR
#define PADR PA.DR.BYTE
#define PBDDR PB.DDR
#define PBDR PB.DR.BYTE
#define MASKFFFF 0xffff
#define MASKFF 0xff
#define MASKCF 0xcf
#define MASK0F 0x0f
#define MASK80 0x80
#define MASK03 0x03
#define OFF 0
#define ON OFF+1
#define MASKF0 0xf0
#define CLOSED 0
#define OPENED CLOSED+1
#define DIR_CENTER 0
#define DIR_RIGHT 1
#define DIR_LEFT 2
UBYTE sgate ;
UBYTE timeoutcnt ;
UBYTE dir[2] ;
UBYTE left ;
UBYTE right ;
UBYTE state ;
UBYTE mstate ;
UBYTE mode ;
UBYTE sloapf ;
UBYTE sloapr ;
UBYTE sloap ;
UBYTE sloapt[3] ;
UBYTE xcnt3 ;
UBYTE xcnt5 ;
UBYTE xcnt6 ;
UBYTE normal_l[13] ;
UBYTE normal_r[13] ;
UBYTE crank_l[13] ;
UBYTE crank_r[13] ;
UBYTE lane_l[13] ;
UBYTE lane_r[13] ;
UBYTE run_tsk ;
UWORD ready ;
UWORD suspend ;
UWORD waitq ;
UWORD bpat[16] ;
#define ALL_BLACK 0
#define ALL_WHITE 1
#define LEFT_WHITE 2
#define RIGHT_WHITE 3
#define CENTER 4
#define TINY_RIGHT 5
#define RIGHT 6
#define BIG_RIGHT 7
#define TINY_LEFT 8
#define LEFT 9
#define BIG_LEFT 10
#define BOTH_WHITE 11
#define ILLEAGAL 12
#define GEAR0 10
#define GEAR5 150
#define GEAR10 300
#define GEAR15 450
#define GEAR20 600
#define GEAR25 750
#define GEAR30 900
#define GEAR35 1050
#define GEAR40 1200
#define GEAR45 1350
#define GEAR50 1500
#define GEAR55 1650
#define GEAR60 1800
#define GEAR65 1950
#define GEAR70 2100
#define GEAR75 2250
#define GEAR80 2400
#define GEAR85 2550
#define GEAR90 2700
#define GEAR95 2850
#define GEAR100 2999
#define IDLE 0
#define RUN IDLE+1
#define SGATE_BIT 4
#define EDC_BIT 1
void init_sci_1(TBaudRate x);
void rs1_putchar(UBYTE x);
void rs1_crlf(void);
void rs1_puts(UBYTE *x);
void show_help(void);
UBYTE sindex ;
UBYTE sbuf[16];
UBYTE cmd ;
UBYTE asc_hex[16] = {'0','1','2','3','4','5','6','7','8','9','A','B','C','D','E','F'} ;
/*--------------------------------*/
/* Insert user functions protoype */
/*--------------------------------*/
void init_usr(void);
void init_timer1(void);
void init_table(void);
UBYTE get_hex(UBYTE x);
void delay_ms(UWORD x);
void binary_display(UBYTE x);
UWORD conv_value(UBYTE x);
UBYTE get_swx(void);
void send_motor_power(UBYTE x);
/*-------------*/
/* system call */
/*-------------*/
void cre_tsk(UBYTE tid,void (*tsk)(void));
void rsm_tsk(UBYTE tid);
void sus_tsk(UBYTE tid);
void slp_tsk(void);
void wai_tsk(UWORD x);
void init_os(void);
void timer_handler(void);
UBYTE is_tsk_ready(UBYTE tid);
/*------*/
/* task */
/*------*/
void tsk0_proc(void);
void tsk1_proc(void);
void tsk2_proc(void);
void tsk3_proc(void);
void tsk4_proc(void);
void tsk5_proc(void);
void tsk6_proc(void);
void tsk7_proc(void);
void tsk8_proc(void);
/*------*/
/* main */
/*------*/
int main(void)
{
TCBP pcur_tsk ;
/* disable interrupt */
DI ;
/* initialize */
init_usr();
/* initialize monitor */
init_os();
/* enable interrupt */
EI ;
/* opening message */
rs1_puts("Hello");
rs1_crlf();
/* endless loop */
run_tsk = TSK_ID0 ;
while ( ON ) {
/* RTOS */
pcur_tsk = tcb[run_tsk] ;
if ( is_tsk_ready( run_tsk ) ) { (*(pcur_tsk.tsk))(); }
run_tsk++;
if ( run_tsk == TSK_ID_MAX ) { run_tsk = TSK_ID0 ; }
/* 10ms handling */
if ( WFLAG == ON ) {
WFLAG = OFF ;
timer_handler();
}
}
return 0 ;
}
/*-----------------------*/
/* Insert user functions */
/*-----------------------*/
void init_usr(void)
{
/* PORT 4 */
P4DR = 0x00 ;
P4DDR = MASKFF ; /* all outputs */
/* PORT 6 */
P6DR = 0x00 ;
P6DDR = 0x00 ; /* all inputs */
/* PORT A */
PADR = 0 ;
PADDR = MASKFF ; /* all outputs */
/* PORT B */
PBDR = 0xc0 ;
PBDDR = 0xcf ; /* PB5,PB4 are inputs , others are outputs */
/* initialize */
init_timer1();
/* clear flags */
xflags.DR = 0 ;
/* initialize PWM */
{
ITU.TSTR.BIT.STR3 = (UBYTE)0x00; /* Stop the counter */
ITU.TOER.BYTE = (UBYTE)0x00;
ITU3.TCR.BYTE = (UBYTE)0xa0;
ITU3.TCNT = (UWORD)0x00;
ITU.TFCR.BYTE = (UBYTE)0xf6;
ITU3.GRA = (UWORD)3000;
ITU4.GRA = (UWORD)GEAR0;
ITU3.GRB = (UWORD)GEAR0;
}
/* start PWM */
{
ITU.TOER.BYTE = (UBYTE)0xff;
ITU.TSTR.BIT.STR3 = (UBYTE)0x01;
ITU3.BRB = (UWORD)GEAR10;
ITU4.BRA = (UWORD)GEAR10;
}
/* clear SCI buffer */
*(sbuf+0) = 0 ;
sindex = 0 ;
/* initialize */
timcnt = 0 ;
xcnt3 = 0 ;
xcnt5 = 0 ;
xcnt6 = 0 ;
/* SCI */
init_sci_1(br9600);
/* others */
init_table();
left = 0 ;
right = 0 ;
state = IDLE ;
mstate = 0 ;
sloap = 0 ;
sloapf = 0 ;
sloapr = 0 ;
*(sloapt+0) = 100 ;
*(sloapt+1) = 120 ;
*(sloapt+2) = 80 ;
}
void init_timer1(void)
{
/* stop timer */
ITU.TSTR.BIT.STR1 = OFF ;
/* TOER : Timer Output Enable Register
7 **** -> 0
6 **** -> 0
5 EXB4 -> 0
4 EXA4 -> 0
3 EB3 -> 0
2 EB4 -> 0
1 EA4 -> 0
0 EA3 -> 0
*/
ITU.TOER.BYTE = 0 ;
/* TIOR : Timer I/O Control Register
7 **** -> 0
6 IOB2 -> 0 GRB is not output compare match register
5 IOB1 -> 0
4 IOB0 -> 0
3 **** -> 0
2 IOA2 -> 0 GRA is not output compare match register
1 IOA1 -> 0
0 IOA0 -> 0
*/
ITU1.TIOR.BYTE = 0 ;
/* TCR : Timer Control Register
7 **** -> 0
6 CCLR1 -> 0 clear TCNT if GRA = TCNT
5 CCLR0 -> 1
4 CKEG1 -> 0 rising edge
3 CKEG0 -> 0
2 TPSC2 -> 0 φ利用
1 TPSC1 -> 0
0 TPSC0 -> 0
*/
ITU1.TCR.BYTE = 0x20 ;
/* TIER : Timer Interrupt Enable Register
7 **** -> 0
6 *** -> 0
5 *** -> 0
4 *** -> 0
3 *** -> 0
2 OVIE -> 0
1 IMIEB -> 0
0 IMIEA -> 1 select compare match interrupt
*/
ITU1.TIER.BIT.IMIEA = ON ;
/* reference */
ITU1.GRA = ITU1_AREG ;
ITU1.GRB = MASKFFFF ;
/* counter */
ITU1.TCNT = 0 ;
/* start timer */
ITU.TSTR.BIT.STR1 = ON ;
}
/*+++++++++++++++++++++++++++++++++++++*/
/* ITU1 interrupt with compare match A */
/* 1ms interval */
/*+++++++++++++++++++++++++++++++++++++*/
void int_imia1(void)
{
UBYTE dummy ;
/* clear flag */
dummy = ITU1.TSR.BIT.IMFA ;
ITU1.TSR.BIT.IMFA = OFF ;
/* increment */
timcnt++ ;
/* judge 10ms passed */
if ( timcnt & 10 ) { WFLAG = ON ; }
/* judge 1000ms passed */
if ( (timcnt & 1023) == 100 ) {
timeoutcnt++ ;
}
}
/*+++++++++++++++++++++++++*/
/* SCI_1 receive interrupt */
/*+++++++++++++++++++++++++*/
void init_sci_1(TBaudRate x)
{
volatile UWORD i;
/* SCR : Serial Control Register
7 bit TIE -> 0 Transmit Interrupt Enable(disable)
6 bit RIE -> 0 Receive Interrupt Enable(disable)
5 bit TE -> 0 Transmit Enable(disable)
4 bit RE -> 0 Receive Enable(disable)
3 bit MPIE -> 0 Multi Processor Interrupt Enable(disable)
2 bit TEIE -> 0 Transmit End Interrupt Enable(disable)
1 bit CKE1 -> 0 Clock Source (Use Internal Baud Rate Generator)
0 bit CKE0 -> 0
*/
SCI1.SCR.BYTE = 0 ;
/* SMR : Serial Mode Register
7 bit C/nA -> 0 Communication Mode(Asynchronous)
6 bit CHR -> 0 data Charactor (8 bits)
5 bit PE -> 0 Parity Enable(disable)
4 bit O/nE -> 0 Parity Mode(even)
3 bit STOP -> 0 Stop Bit(1 bit)
2 bit MP -> 0 Multi Processor(disable)
1 bit CKS1 -> 0 Clock Source ( φ )
0 bit CKS0 -> 0
*/
SCI1.SMR.BYTE = 0 ;
/* data transfer speed */
SCI1.BRR = x ;
/* wait 1 frame */
for (i = 0; i < 3000 ; i++) ;
/* enable Transmmit and Receive with interrupt */
SCI1.SCR.BYTE = 0x70 ;
}
/*+++++++++++++++++++++++++*/
/* SCI_1 receive interrupt */
/*+++++++++++++++++++++++++*/
void int_rxi1(void)
{
volatile UBYTE ch,dummy ;
/* clear flag */
dummy = SCI1.SSR.BYTE ;
SCI1.SSR.BIT.RDRF = OFF ;
/* get a character */
ch = SCI1.RDR ;
/* store */
*(sbuf+sindex) = ch ;
sindex++ ;
/* check */
if ( ch == '\r' ) {
*(sbuf+sindex) = 0 ;
sindex = 0 ;
UFLAG = ON ;
}
}
/*+++++++++++++++*/
/* SCI_1 putchar */
/*+++++++++++++++*/
void rs1_putchar(UBYTE x)
{
/* wait data transfer */
while ( SCI1.SSR.BIT.TDRE == OFF ) ;
/* put */
SCI1.TDR = x ;
SCI1.SSR.BIT.TDRE = OFF ;
}
/*++++++++++++*/
/* SCI_1 puts */
/*++++++++++++*/
void rs1_puts(UBYTE *x)
{
while ( *x ) {
/* send 1 charactors */
rs1_putchar(*x);
x++ ;
}
}
/*++++++++++++*/
/* SCI_1 crlf */
/*++++++++++++*/
void rs1_crlf(void)
{
rs1_putchar('\r');
rs1_putchar('\n');
}
/*++++++++++++++++++++*/
/* SCI_1 command help */
/*++++++++++++++++++++*/
void show_help(void)
{
rs1_puts("? help") ; rs1_crlf();
rs1_puts("E enable") ; rs1_crlf();
rs1_puts("e disable") ; rs1_crlf();
}
void init_table(void)
{
/* NORMAL */
*(normal_l+ALL_BLACK) = 10 ; *(normal_r+ALL_BLACK) = 10 ;
*(normal_l+ALL_WHITE) = 30 ; *(normal_r+ALL_WHITE) = 30 ;
*(normal_l+LEFT_WHITE) = 30 ; *(normal_r+LEFT_WHITE) = 30 ;
*(normal_l+RIGHT_WHITE) = 30 ; *(normal_r+RIGHT_WHITE) = 30 ;
*(normal_l+CENTER) = 50 ; *(normal_r+CENTER) = 50 ;
*(normal_l+TINY_RIGHT) = 50 ; *(normal_r+TINY_RIGHT) = 55 ;
*(normal_l+RIGHT) = 50 ; *(normal_r+RIGHT) = 60 ;
*(normal_l+BIG_RIGHT) = 50 ; *(normal_r+BIG_RIGHT) = 70 ;
*(normal_l+TINY_LEFT) = 55 ; *(normal_r+TINY_LEFT) = 50 ;
*(normal_l+LEFT) = 60 ; *(normal_r+LEFT) = 50 ;
*(normal_l+BIG_LEFT) = 70 ; *(normal_r+BIG_LEFT) = 50 ;
*(normal_l+BOTH_WHITE) = 20 ; *(normal_r+BOTH_WHITE) = 20 ;
*(normal_l+ILLEAGAL) = 10 ; *(normal_r+ILLEAGAL) = 10 ;
/* CRANK */
*(crank_l+ALL_BLACK) = 10 ; *(crank_r+ALL_BLACK) = 10 ;
*(crank_l+ALL_WHITE) = 25 ; *(crank_r+ALL_WHITE) = 25 ;
*(crank_l+LEFT_WHITE) = 25 ; *(crank_r+LEFT_WHITE) = 25 ;
*(crank_l+RIGHT_WHITE) = 25 ; *(crank_r+RIGHT_WHITE) = 25 ;
*(crank_l+CENTER) = 30 ; *(crank_r+CENTER) = 30 ;
*(crank_l+TINY_RIGHT) = 30 ; *(crank_r+TINY_RIGHT) = 35 ;
*(crank_l+RIGHT) = 30 ; *(crank_r+RIGHT) = 40 ;
*(crank_l+BIG_RIGHT) = 30 ; *(crank_r+BIG_RIGHT) = 45 ;
*(crank_l+TINY_LEFT) = 35 ; *(crank_r+TINY_LEFT) = 30 ;
*(crank_l+LEFT) = 40 ; *(crank_r+LEFT) = 30 ;
*(crank_l+BIG_LEFT) = 45 ; *(crank_r+BIG_LEFT) = 30 ;
*(crank_l+BOTH_WHITE) = 20 ; *(crank_r+BOTH_WHITE) = 20 ;
*(crank_l+ILLEAGAL) = 10 ; *(crank_r+ILLEAGAL) = 10 ;
/* LANE */
*(lane_l+ALL_BLACK) = 10 ; *(lane_r+ALL_BLACK) = 10 ;
*(lane_l+ALL_WHITE) = 25 ; *(lane_r+ALL_WHITE) = 25 ;
*(lane_l+LEFT_WHITE) = 25 ; *(lane_r+LEFT_WHITE) = 25 ;
*(lane_l+RIGHT_WHITE) = 25 ; *(lane_r+RIGHT_WHITE) = 25 ;
*(lane_l+CENTER) = 30 ; *(lane_r+CENTER) = 30 ;
*(lane_l+TINY_RIGHT) = 30 ; *(lane_r+TINY_RIGHT) = 35 ;
*(lane_l+RIGHT) = 30 ; *(lane_r+RIGHT) = 40 ;
*(lane_l+BIG_RIGHT) = 30 ; *(lane_r+BIG_RIGHT) = 45 ;
*(lane_l+TINY_LEFT) = 35 ; *(lane_r+TINY_LEFT) = 30 ;
*(lane_l+LEFT) = 40 ; *(lane_r+LEFT) = 30 ;
*(lane_l+BIG_LEFT) = 45 ; *(lane_r+BIG_LEFT) = 30 ;
*(lane_l+BOTH_WHITE) = 20 ; *(lane_r+BOTH_WHITE) = 20 ;
*(lane_l+ILLEAGAL) = 10 ; *(lane_r+ILLEAGAL) = 10 ;
}
UBYTE get_hex(UBYTE x)
{
UBYTE result ;
/* default */
result = 0 ;
/* convert */
if ( '0' <= x && x <= '9' ) { result = x - '0' ; }
if ( 'A' <= x && x <= 'F' ) { result = x - 'A' + 10 ; }
if ( 'a' <= x && x <= 'f' ) { result = x - 'a' + 10 ; }
return result ;
}
void delay_ms(UWORD x)
{
ULONG target ;
/* calculate last value */
target = timcnt + x ;
/* wait */
while ( timcnt < target ) ;
}
void binary_display(UBYTE x)
{
UBYTE loop ;
UBYTE bdat ;
/* show */
for ( loop = 0 ; loop < 8 ; loop++ ) {
bdat = '0' ;
if ( x & MASK80 ) { bdat++ ; }
rs1_putchar( bdat );
x <<= 1 ;
}
}
UWORD conv_value(UBYTE x)
{
UWORD result ;
/* convert */
switch ( x ) {
case 5 : result = GEAR5 ; break ;
case 10 : result = GEAR10 ; break ;
case 15 : result = GEAR15 ; break ;
case 20 : result = GEAR20 ; break ;
case 25 : result = GEAR25 ; break ;
case 30 : result = GEAR30 ; break ;
case 35 : result = GEAR35 ; break ;
case 40 : result = GEAR40 ; break ;
case 45 : result = GEAR45 ; break ;
case 50 : result = GEAR50 ; break ;
case 55 : result = GEAR55 ; break ;
case 60 : result = GEAR60 ; break ;
case 65 : result = GEAR65 ; break ;
case 70 : result = GEAR70 ; break ;
case 75 : result = GEAR75 ; break ;
case 80 : result = GEAR80 ; break ;
case 85 : result = GEAR85 ; break ;
case 90 : result = GEAR90 ; break ;
case 95 : result = GEAR95 ; break ;
case 100 : result = GEAR100 ; break ;
default : result = GEAR0 ; break ;
}
return result ;
}
void send_dc(UBYTE lx,UBYTE rx)
{
UWORD left ;
UWORD right ;
/* convert */
left = conv_value( lx );
right = conv_value( rx );
/* store */
ITU3.BRB = (UWORD)left;
ITU4.BRA = (UWORD)right;
}
UBYTE get_sensor(void)
{
UBYTE result ;
/* get information from PORT7 lower nibble */
result = P7DR ;
/* masking */
result &= MASK0F ;
return result ;
}
UBYTE get_start(void)
{
return sgate;
}
void show_state(UBYTE x)
{
UBYTE result;
/* generate code */
result = (1 << x);
/* impress */
P4DR = result ^ MASKFF ;
}
UBYTE get_swx(void)
{
UBYTE tmp ;
/* get switch state */
tmp = P6DR ^ MASKF0 ;
/* shift */
tmp >>= 4 ;
return tmp ;
}
void send_motor_power(UBYTE x)
{
if ( x == ON ) { PBDR |= (1 << EDC_BIT); }
else { PBDR &= ~(1 << EDC_BIT); }
}
/* system call */
void cre_tsk(UBYTE tid,void (*tsk)(void))
{
tcb[tid].tsk = tsk;
tcb[tid].wcount = 0;
}
void sta_tsk(UBYTE tid,UBYTE tst)
{
UWORD xtmp ;
xtmp = (1 << tid) ;
if ( tst == TTS_READY ) { ready |= xtmp ; }
if ( tst == TTS_SUSPEND ) { suspend |= xtmp ; }
if ( tst == TTS_WAIT ) { waitq |= xtmp ; }
}
void rsm_tsk(UBYTE tid)
{
UWORD tmp ;
UWORD tmpx ;
/* get bit pattern */
tmp = *(bpat+tid);
tmpx = tmp ^ MASKFFFF ;
/* bit operation */
ready |= tmp;
suspend &= tmpx;
waitq &= tmpx;
}
void sus_tsk(UBYTE tid)
{
UWORD tmp ;
UWORD tmpx ;
/* get bit pattern */
tmp = *(bpat+tid);
tmpx = tmp ^ MASKFFFF ;
/* bit operation */
ready &= tmpx;
suspend |= tmp ;
waitq &= tmpx;
}
void slp_tsk(void)
{
sus_tsk(run_tsk);
}
void wai_tsk(UWORD x)
{
UWORD tmp ;
UWORD tmpx ;
/* get bit pattern */
tmp = *(bpat+run_tsk);
tmpx = tmp ^ MASKFFFF ;
/* bit operation */
ready &= tmpx;
suspend &= tmpx;
waitq |= tmp ;
/* update counter */
tcb[run_tsk].wcount = x ;
}
void init_os(void)
{
UBYTE i;
/* initialize queue */
ready = 0;
suspend = 0;
waitq = 0;
/* initalize pattern */
for ( i = 0 ; i < 16 ; i++ ) { *(bpat+i) = (1 << i) ; }
/* create task */
cre_tsk(TSK_ID0,tsk0_proc); cre_tsk(NORMAL ,tsk1_proc);
cre_tsk(CRANK ,tsk2_proc); cre_tsk(ROTATE ,tsk3_proc);
cre_tsk(LANE ,tsk4_proc); cre_tsk(CHANGE ,tsk5_proc);
cre_tsk(BLIND ,tsk6_proc); cre_tsk(TSK_ID7,tsk7_proc);
cre_tsk(XDEBUG ,tsk8_proc);
/* start task state */
sta_tsk(TSK_ID0,TTS_READY) ; sta_tsk(TSK_ID1,TTS_SUSPEND);
sta_tsk(TSK_ID2,TTS_SUSPEND); sta_tsk(TSK_ID3,TTS_SUSPEND);
sta_tsk(TSK_ID4,TTS_SUSPEND); sta_tsk(TSK_ID5,TTS_SUSPEND);
sta_tsk(TSK_ID6,TTS_SUSPEND); sta_tsk(TSK_ID7,TTS_READY);
sta_tsk(TSK_ID8,TTS_READY) ;
}
void timer_handler(void)
{
UBYTE i ;
for ( i = 0 ; i < TSK_ID_MAX ; i++ ) {
/* judge WAIT state */
if ( waitq & *(bpat+i) ) {
tcb[i].wcount-- ;
if ( tcb[i].wcount == 0 ) { rsm_tsk(i); }
}
}
}
UBYTE is_tsk_ready(UBYTE tid)
{
return( ready & *(bpat+tid) ) ;
}
/* system control */
void tsk0_proc(void)
{
/* debug run */
mode = get_swx() ;
if ( mode & 0x08 ) {
/* set flag */
MFLAG = ON ;
/* get mode */
mode &= 7 ;
/* change state */
state = RUN ;
/* crank */
if ( mode == 2 ) { rsm_tsk(CRANK); }
/* rotate */
if ( mode == 3 ) { rsm_tsk(ROTATE); }
/* lane */
if ( mode == 4 ) { rsm_tsk(LANE); }
/* change */
if ( mode == 5 ) { rsm_tsk(CHANGE); }
/* blind */
if ( mode == 6 ) { rsm_tsk(BLIND); }
/* enable motor power */
send_motor_power(ON);
/* timer trigger clear */
timeoutcnt = 0 ;
TFLAG = OFF ;
}
/* start trigger */
if ( state == IDLE ) {
if ( get_start() == OPENED ) {
state = RUN ;
rsm_tsk(NORMAL);
/* enable motor power */
send_motor_power(ON);
/* timer trigger clear */
timeoutcnt = 0 ;
TFLAG = OFF ;
}
}
/* timeout */
if ( state == RUN ) {
if ( TFLAG == ON ) {
state = IDLE ;
/* suspend move handling task */
state = IDLE ;
sus_tsk(NORMAL);
sus_tsk(CRANK);
sus_tsk(ROTATE);
sus_tsk(LANE);
sus_tsk(CHANGE);
sus_tsk(BLIND);
/* machine state */
mstate = 0 ;
/* disable motor power */
send_motor_power(OFF);
}
}
/* show state */
show_state( mstate );
}
/* NORMAL */
void tsk1_proc(void)
{
UBYTE xmul ;
UBYTE flag ;
UBYTE xsensor ;
/* default */
flag = OFF ;
/* show state */
mstate = 1 ;
show_state( mstate );
/* get sensor */
xsensor = get_sensor();
/* update motor duty ratio */
left = *(normal_l+xsensor);
right = *(normal_r+xsensor);
/* default */
*(dir+0) = DIR_CENTER ;
*(dir+1) = DIR_CENTER ;
/* get sensor */
if ( xsensor == CENTER ) {
/* climb hill or down hill */
if ( sloap ) {
xmul = *(sloapt+sloap) ;
left = (UBYTE)( xmul * left * 1.0 / 100 );
right = (UBYTE)( xmul * right * 1.0 / 100 );
}
}
/* update */
send_dc(left,right);
/* judge */
if ( xsensor == ALL_WHITE ) {
rsm_tsk(CRANK);
flag = ON ;
}
if ( xsensor == LEFT_WHITE ) {
*(dir+0) = DIR_LEFT ;
*(dir+1) = DIR_RIGHT ;
rsm_tsk(LANE);
flag = ON ;
}
if ( xsensor == RIGHT_WHITE ) {
*(dir+0) = DIR_RIGHT ;
*(dir+0) = DIR_LEFT ;
rsm_tsk(LANE);
flag = ON ;
}
/* cyclic */
if ( flag == ON ) {
flag = OFF ;
slp_tsk();
} else {
wai_tsk( 10 );
}
}
/* CRANK */
void tsk2_proc(void)
{
UBYTE flag ;
UBYTE xsensor ;
/* default */
flag = OFF ;
/* show state */
mstate = 2 ;
show_state( mstate );
/* get sensor */
xsensor = get_sensor();
/* update motor duty ratio */
left = *(crank_l+xsensor);
right = *(crank_r+xsensor);
/* update */
send_dc(left,right);
/* judge */
if ( xsensor == LEFT_WHITE ) {
*(dir+0) = DIR_LEFT ;
*(dir+1) = DIR_RIGHT ;
}
if ( xsensor == RIGHT_WHITE ) {
*(dir+0) = DIR_RIGHT ;
*(dir+1) = DIR_LEFT ;
}
if ( xsensor == ALL_BLACK ) {
/* initialize sequence counter */
xcnt3 = 0 ;
/* update state */
rsm_tsk(ROTATE);
flag = ON ;
}
/* cyclic */
if ( flag == ON ) {
flag = OFF ;
slp_tsk();
} else {
wai_tsk( 100 );
}
}
/* ROTATE */
void tsk3_proc(void)
{
UBYTE flag ;
UBYTE xsensor ;
/* default */
flag = OFF ;
/* show state */
mstate = 3 ;
show_state( mstate );
/* get sensor */
xsensor = get_sensor();
/* sequence */
switch ( xcnt3 ) {
/* rotate */
case 0 :
xcnt3 = 1 ;
left = 50 ; right = 10 ;
if ( *(dir+0) == DIR_RIGHT ) {
left = 10 ; right = 50 ;
}
break ;
/* judge */
case 1 :
xcnt3 = 1 ;
if ( xsensor == CENTER ) {
left = 30 ; right = 30 ;
xcnt3 = 2 ;
}
break ;
/* straight and move */
case 2 :
xcnt3 = 3 ;
break ;
/* exit */
case 3 :
rsm_tsk(NORMAL);
flag = ON ;
break ;
/* others */
default:
break;
}
/* update */
send_dc(left,right);
/* cyclic */
if ( flag == ON ) {
xcnt3 = 0 ;
flag = OFF ;
slp_tsk();
} else {
wai_tsk( 100 );
}
}
/* LANE */
void tsk4_proc(void)
{
UBYTE flag ;
UBYTE xsensor ;
/* default */
flag = OFF ;
/* show state */
mstate = 4 ;
show_state( mstate );
/* get sensor */
xsensor = get_sensor();
/* update motor duty ratio */
left = *(lane_l+xsensor) ;
right = *(lane_r+xsensor) ;
/* update */
send_dc(left,right);
/* judge */
if ( xsensor == ALL_BLACK ) {
/* initialize sequence counter */
xcnt5 = 0 ;
/* update state */
rsm_tsk(CHANGE);
flag = ON ;
}
if ( xsensor == LEFT_WHITE ) {
*(dir+0) = DIR_LEFT ;
*(dir+1) = DIR_RIGHT ;
}
if ( xsensor == RIGHT_WHITE ) {
*(dir+0) = DIR_RIGHT ;
*(dir+1) = DIR_LEFT ;
}
/* cyclic */
if ( flag == ON ) {
flag = OFF ;
slp_tsk();
} else {
wai_tsk( 10 );
}
}
/* CHANGE */
void tsk5_proc(void)
{
UBYTE flag ;
/* default */
flag = OFF ;
/* show state */
mstate = 5 ;
show_state( mstate );
/* sequence */
switch ( xcnt5 ) {
/* rotate */
case 0 :
xcnt5 = 1 ;
/* set rotate direction */
left = 50 ; right = 30 ;
if ( *(dir+0) == DIR_LEFT ) {
left = 30 ; right = 50 ;
}
break ;
/* straight */
case 1 :
xcnt5 = 2 ;
left = 30 ; right = 30 ;
break ;
/* move */
case 2 :
xcnt5 = 3 ;
break ;
/* exit */
case 3 :
rsm_tsk(BLIND);
flag = ON ;
break ;
/* others */
default:
break;
}
/* update */
send_dc(left,right);
/* cyclic */
if ( flag == ON ) {
flag = OFF ;
xcnt5 = 0 ;
xcnt6 = 0 ;
slp_tsk();
} else {
wai_tsk( 10 );
}
}
/* BLIND */
void tsk6_proc(void)
{
UBYTE flag ;
UBYTE xsensor ;
/* default */
flag = OFF ;
/* show state */
mstate = 6 ;
show_state( mstate );
/* get sensor */
xsensor = get_sensor();
/* sequence */
switch ( xcnt6 ) {
/* straight */
case 0 :
xcnt6 = 1 ;
left = 30 ; right = 30 ;
break ;
/* judge and move */
case 1 :
xcnt6 = 1 ;
if ( xsensor == CENTER ) { xcnt6 = 2 ; }
if ( xsensor == TINY_LEFT ) { xcnt6 = 2 ; }
if ( xsensor == TINY_RIGHT ) { xcnt6 = 2 ; }
break ;
/* rotate */
case 2 :
xcnt6 = 3 ;
/* set rotate direction */
left = 50 ; right = 30 ;
if ( *(dir+1) == DIR_LEFT ) {
left = 30 ; right = 50 ;
}
break ;
/* move */
case 3 :
xcnt6 = 4 ;
left = 30 ; right = 30 ;
break ;
/* exit */
case 4 :
rsm_tsk(NORMAL);
flag = ON ;
break ;
/* others */
default:
break;
}
/* update */
send_dc(left,right);
/* cyclic */
if ( flag == ON ) {
flag = OFF ;
xcnt6 = 0 ;
slp_tsk();
} else {
wai_tsk( 10 );
}
}
/* sensing */
void tsk7_proc(void)
{
UBYTE stmp ;
UBYTE xsensor ;
/* get sensor data */
xsensor = P7DR ;
/* start gate */
sgate = CLOSED ;
if ( !(xsensor & (1 << SGATE_BIT)) ) { sgate = OPENED ; }
/* sloap */
sloapf <<= 1 ; sloapf &= MASK03 ;
sloapr <<= 1 ; sloapr &= MASK03 ;
if ( xsensor & 0x40 ) { sloapr |= ON ; }
if ( xsensor & 0x80 ) { sloapf |= ON ; }
sloap = 0 ;
if ( sloapf == 3 ) { sloap |= 1 ; }
if ( sloapr == 3 ) { sloap |= 2 ; }
/* time out */
if ( timeoutcnt > 119 ) { TFLAG = ON ; }
/* wait 50ms */
wai_tsk(5);
}
/* execute debug */
void tsk8_proc(void)
{
if ( UFLAG == ON ) {
/* clear */
UFLAG = OFF ;
/* new line */
rs1_crlf();
/* command interpreter */
cmd = *(sbuf+0) ;
/* help */
if ( cmd == '?' ) { show_help() ; }
/* enable DCDC conveter */
if ( cmd == 'E' ) { send_motor_power(ON); }
/* disable DCDC conveter */
if ( cmd == 'e' ) { send_motor_power(OFF); }
}
}
目次 前 次