スタートゲートセンサー
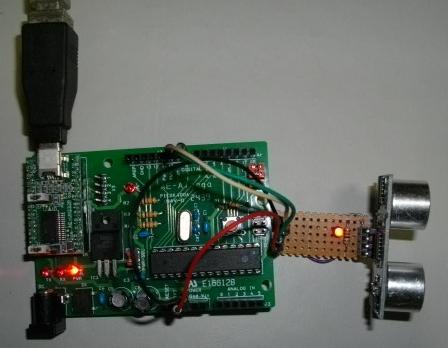
MCR_VCへの参加で知合いになった、京都のIさんから 他のロボットコンテストに利用する超音波センサー の評価依頼が来ました。マイコンがついているようで、電源2ピンとTRG ECHOの2ピンだけで、測距ができます。 そのままでは使いにくいため、4ピンのソケットをつけ 信号線をArduinoに接続できるようにしました。
電子部品をみると、中央にマイコン、左にOPアンプの LM324、右にシリアルインタフェース用ICのMAX232C 互換品が実装されています。 おそらく、次のように使われているのでしょう。 MAX232C互換ICは、5Vから正負電圧を生成する電源IC。 LM324で40kHzのパルスを増幅し、送信デバイスに出力。 受信デバイスの反射波を検出し、マイコンで判定可能 となる電圧まで増幅。 マイコンは40kHzパルス生成と反射波が来るまでの時間計測。 外部トリガーと距離相当パルス出力処理を担当。 マイコンは14ピンで、クロックを内蔵しているようで PIC16F688クラスを利用しているようです。マイコンの 型番刻印がないので、推定でしかないですが。 配線は簡単にして、電源の逆接続防止にLEDをつけます。
Iさんの情報で、次のタイミングチャートで動作しているとか。
トリガーを与えると測距後に、パルス幅で距離を返してきます。 トリガーのパルス幅は、最小で10usというので、どれくらい まで許容されるのかを調べていきます。 スイッチサイエンスのページに、Arduinoのサンプルコードが ありましたが、評価用途では使いにくいので、自分でスケッチ を作成しました。 #define OFF 0 #define ON OFF+1 /* pin assignment */ int TRG = 8 ; int ECHO = 9 ; /* variables */ int dtime ; float distance ; byte td ; /* trigger width */ /* control variables */ byte eflag ; byte sflag ; byte sindex ; byte sbuf[4] ; byte cmd ; void setup() { /* initialize serial port */ Serial.begin(9600); /* define digital pin */ pinMode(TRG ,OUTPUT); pinMode(ECHO,INPUT); /* set initial state */ digitalWrite(TRG,LOW); /* clear variable */ td = 10 ; /* command interpreter buffer */ sflag = OFF ; eflag = OFF ; sindex = 0 ; } void loop() { /* line sensing */ if ( eflag == ON ) { /* clear flag */ eflag = OFF ; /* send trigger */ digitalWrite(TRG,HIGH); delayMicroseconds(td); digitalWrite(TRG,LOW); /* delaymicroseconds(); */ dtime = pulseIn(ECHO,HIGH); /* calculate */ distance = (340 * 1.0 * dtime / 1000) ; /* format mm */ /* adjust */ distance /= 2 ; /* show */ Serial.print("time -> "); Serial.print( dtime ); Serial.println(" us"); Serial.print("distance -> "); Serial.print( distance ); Serial.println(" mm"); } /* serial handling */ if ( sflag == ON ) { /* clear flag */ sflag = OFF ; /* new line */ Serial.println(""); /* get command */ cmd = *(sbuf+0) ; /* judge */ if ( cmd == '?' ) { Serial.println("? help"); Serial.println("e execute"); Serial.println("i increment trigger width"); Serial.println("d decrement trigger width"); } /* execute */ if ( cmd == 'e' ) { eflag = ON ; } /* increment */ if ( cmd == 'i' ) { /* now value */ Serial.print( td ); Serial.print(" -> "); /* update */ td++ ; if ( td > 20 ) { td = 20 ; } /* show */ Serial.println( td ); } /* decrement */ if ( cmd == 'd' ) { /* now value */ Serial.print( td ); Serial.print(" -> "); /* update */ td-- ; if ( td == 0 ) { td = 1 ; } /* show */ Serial.println( td ); } } } /* receive interrupt */ void serialEvent() { char ch; if ( Serial.available() > 0 ) { /* get 1 character */ ch = Serial.read(); /* store */ *(sbuf+sindex) = ch ; /* increment */ sindex++ ; /* judge */ if ( ch == '\r' ) { sindex = 0 ; sflag = ON ; } } } シリアルインタフェースでArduinoとPCを接続し Arduinoに超音波センサーを制御させます。 コマンドインタプリタを用意し、TRGパルス幅と 測距結果を調べます。 コマンドは、4種としました。
- ? ヘルプ
- e 測距実行
- i パルス幅を1増やす(ただし、20より上回らない)
- d パルス幅を1減らす(ただし、1より下回らない)
 Arduinoとセンサーの接続は、次のようにしました。
Arduinoとセンサーの接続は、次のようにしました。
 音速は、気温により変化しますが、340m/s固定として
計算しています。使う場合は、距離に幅を持たせての
判定をします。
スタートゲートセンサーとして使うには、ゲートが開いて
いるのか、閉じているのかを判断できればよいでしょう。
Arduinoの出力を利用し、D/Aコンバータを構成して対応
します。
6ビットのD/Aコンバータを接続します。
音速は、気温により変化しますが、340m/s固定として
計算しています。使う場合は、距離に幅を持たせての
判定をします。
スタートゲートセンサーとして使うには、ゲートが開いて
いるのか、閉じているのかを判断できればよいでしょう。
Arduinoの出力を利用し、D/Aコンバータを構成して対応
します。
6ビットのD/Aコンバータを接続します。
 R-2Rの抵抗を使ったD/Aコンバータですが、スタートゲートの
状態が2値なので、このような簡易タイプで充分です。
抵抗、OPアンプがあったりで面倒に見えますが、表面実装品
を利用すれば、意外に小型にできます。OPアンプは、電圧を
電源電圧まで利用したければ、CMOSタイプのRailToRail品を
使うだけです。
マイコンによっては、A/Dコンバータによる電圧値を
使った方がよい場合もあるので、次のようにArduino
にD/Aコンバータを接続して、使うことも可能です。
R-2Rの抵抗を使ったD/Aコンバータですが、スタートゲートの
状態が2値なので、このような簡易タイプで充分です。
抵抗、OPアンプがあったりで面倒に見えますが、表面実装品
を利用すれば、意外に小型にできます。OPアンプは、電圧を
電源電圧まで利用したければ、CMOSタイプのRailToRail品を
使うだけです。
マイコンによっては、A/Dコンバータによる電圧値を
使った方がよい場合もあるので、次のようにArduino
にD/Aコンバータを接続して、使うことも可能です。
 Arduinoのスケッチは、以下。
#include <MsTimer2.h>
#define OFF 0
#define ON OFF+1
#define MASK8000 0x8000
#define CHA 0x7000
#define CHB 0xf000
#define XDELAY 5
#define TDX 11
/* pin assignment */
#define TRG0_BIT 2
#define TRG1_BIT 4
#define TRG2_BIT 7
#define TRG3_BIT 0
#define ECHO0_BIT 3
#define ECHO1_BIT 5
#define ECHO2_BIT 6
#define ECHO3_BIT 9
#define CS0_BIT 0
#define CS1_BIT 1
#define XSCK_BIT 2
#define XMOSI_BIT 3
#define XLOAD_BIT 4
#define DLEDX 5
#define XTIMOUT 13000
/* global variables */
volatile byte xcnt ;
volatile unsigned long dtime[4] ;
volatile word dacv[4] ;
volatile word dacvx[4] ;
volatile byte eflag ;
/* function prototype */
void send_dac_primitive(byte which,word xa,word xb);
void send_dac(void);
void send_led(byte x);
void send_trg(byte x);
unsigned long get_duration(byte x);
word convertv(unsigned long x);
void update_trigger(void);
void setup()
{
byte i ;
/* set initial state */
PORTB = 0x00 ;
PORTC = 0x13 ;
PORTD = 0x00 ;
/* define digital pin */
DDRB = 0xfd ;
DDRC = 0xff ; /* all outputs */
DDRD = 0x96 ;
/* clear flag */
eflag = OFF ;
/* clear variable */
xcnt = 0 ;
for ( i = 0 ; i < 4 ; i++ ) {
*(dacv+i) = 0 ;
*(dacvx+i) = 4000 ;
}
/* initialize DAC */
send_dac();
/* 100ms period */
MsTimer2::set(100,update_trigger);
/* enable */
MsTimer2::start();
}
void loop()
{
byte i ;
/* scan */
if ( eflag == ON ) {
/* clear flag */
eflag = OFF ;
/* sensing */
for ( i = 0 ; i < 4 ; i++ ) {
/* trigger */
send_trg(i) ;
/* measure */
*(dtime+i) = get_duration( i );
/* wait 1ms */
delay( 1 ) ;
}
/* calculate */
for ( i = 0 ; i < 4 ; i++ ) { *(dacvx+i) = convertv(*(dtime+i)) ; }
/* send data to DAC */
send_dac();
}
}
void send_dac_primitive(byte which,word xa,word xb)
{
word tmp ;
byte i ;
byte j ;
/* judge */
if ( which > 1 ) return ;
/* disable chips */
PORTC |= 0x03 ;
/* double transfer */
for ( j = 0 ; j < 2 ; j++ ) {
/* generate code */
tmp = (CHA | (xa & 0x0fff)) ;
if ( j == 1 ) { tmp = (CHB | (xb & 0x0fff)) ; }
/* enable chip select */
if ( which == 0 ) { PORTC &= ~(1 << CS0_BIT) ; }
if ( which == 1 ) { PORTC &= ~(1 << CS1_BIT) ; }
/* bit transfer */
for ( i = 0 ; i < 16 ; i++ ) {
/* impress data */
PORTC &= ~(1 << XMOSI_BIT) ;
if ( tmp & MASK8000 ) { PORTC |= (1 << XMOSI_BIT) ; }
delayMicroseconds(1);
/* SCK : H */
PORTC |= (1 << XSCK_BIT) ;
/* shift */
tmp <<= 1 ;
/* SCK : L */
PORTC &= ~(1 << XSCK_BIT) ;
}
/* disable chip select */
PORTC |= 0x03 ;
delayMicroseconds(1);
}
}
void send_dac(void)
{
byte j ;
/* update */
for ( j = 0 ; j < 4 ; j++ ) {
if ( *(dacv+j) != *(dacvx+j) ) { *(dacv+j) = *(dacvx+j) ; }
}
/* send chip0 */
send_dac_primitive(0,*(dacv+0),*(dacv+1));
/* send chip1 */
send_dac_primitive(1,*(dacv+2),*(dacv+3));
/* impress DAC */
PORTC &= ~(1 << XLOAD_BIT) ;
delayMicroseconds(1);
PORTC |= (1 << XLOAD_BIT) ;
}
void send_led(byte x)
{
if ( x ) { PORTB |= (1 << DLEDX) ; }
else { PORTB &= ~(1 << DLEDX) ; }
}
void send_trg(byte x)
{
/* send trigger (H) */
if ( x == 0 ) { PORTD |= (1 << TRG0_BIT) ; }
if ( x == 1 ) { PORTD |= (1 << TRG1_BIT) ; }
if ( x == 2 ) { PORTD |= (1 << TRG2_BIT) ; }
if ( x == 3 ) { PORTB |= (1 << TRG3_BIT) ; }
/* greater than 11us */
delayMicroseconds(TDX);
/* send trigger (L) */
if ( x == 0 ) { PORTD &= ~(1 << TRG0_BIT) ; }
if ( x == 1 ) { PORTD &= ~(1 << TRG1_BIT) ; }
if ( x == 2 ) { PORTD &= ~(1 << TRG2_BIT) ; }
if ( x == 3 ) { PORTB &= ~(1 << TRG3_BIT) ; }
delayMicroseconds(1);
}
unsigned long get_duration(byte x)
{
unsigned long result ;
/* default */
result = 0 ;
/* judge */
if ( x == 0 ) { result = pulseIn(ECHO0_BIT,HIGH,XTIMOUT); }
if ( x == 1 ) { result = pulseIn(ECHO1_BIT,HIGH,XTIMOUT); }
if ( x == 2 ) { result = pulseIn(ECHO2_BIT,HIGH,XTIMOUT); }
if ( x == 3 ) { result = pulseIn(ECHO3_BIT,HIGH,XTIMOUT); }
return result ;
}
word convertv(unsigned long x)
{
word result ;
/* default */
result = 4000 ;
/*
bitween distance with mili meter format
1000us : 170mm = x : 1mm
x = (100 / 17)us <- 1mm
*/
if ( 0 < x && x < 2353 ) { result = word( (17.0 * x) / 10 ) ; }
return result ;
}
void update_trigger(void)
{
eflag = ON ;
xcnt++ ;
send_led( xcnt & ON );
}
利用D/Aコンバータは、MCP4922ですが
1個¥200くらいで入手できます。
物体とArduino間の距離が400mmになると
最大値4000を設定しています。この部分
は、最大4095まで設定できるので、走行
させてから、範囲を確定します。
一度測定が終わると、60ms以上時間をおいて
測定にしないといけないようです。
ゲートが開いたのか否かの判定は、1秒くらいで
よいので、スタートゲートセンサーとしての問題
は、ないでしょう。
D/Aコンバータの動作を調べたArduinoのスケッチは以下。
#define OFF 0
#define ON OFF+1
#define MASK8000 0x8000
#define CHA 0x7000
#define CHB 0xf000
#define XDELAY 6
/* pin assignment */
#define CS0_BIT 0
#define CS1_BIT 1
#define XSCK_BIT 2
#define XMOSI_BIT 3
#define XLOAD_BIT 4
volatile byte sflag ;
volatile byte sindex ;
volatile byte sbuf[8] ;
volatile byte cmd ;
volatile word xregx ;
volatile word xchx ;
volatile word xcha ;
volatile word xchb ;
void send_dac_data(byte xch,word x);
void show_help();
byte get_hex(char x);
void show_help()
{
Serial.println("? help");
Serial.println("C set or clear Chip Select");
Serial.println("I set or clear SI signal");
Serial.println("K set or clear SCK signal");
Serial.println("L set or clear LOAD signal");
Serial.println("S set DAC value 0000-4095(integer)");
Serial.println("A show both values");
}
void setup()
{
/* initialize serial */
Serial.begin(9600);
/* define digital pin */
DDRD = 0x96 ;
DDRB = 0xfd ;
DDRC = 0xff ; /* all outputs */
/* set initial state */
PORTD = 0x00 ;
PORTB = 0x00 ;
PORTC = 0x13 ;
/* clear event flag */
sflag = OFF ;
/* clear variables */
xregx = 0 ;
xcha = 0 ;
xchb = 0 ;
}
void loop()
{
/* command interpreter */
if ( sflag == ON ) {
/* clear flag */
sflag = OFF ;
/* new line */
Serial.println("");
/* get command */
cmd = *(sbuf+sindex);
/* help */
if ( cmd == '?' ) { show_help() ; }
/* control chip select signal */
if ( cmd == 'C' ) {
PORTC &= ~(1 << CS0_BIT) ;
if ( *(sbuf+1) == '1' ) { PORTC |= (1 << CS0_BIT) ; }
}
/* control data signal */
if ( cmd == 'D' ) {
PORTC &= ~(1 << XMOSI_BIT) ;
if ( *(sbuf+1) == '1' ) { PORTC |= (1 << XMOSI_BIT) ; }
}
/* control sck signal */
if ( cmd == 'K' ) {
PORTC &= ~(1 << XSCK_BIT) ;
if ( *(sbuf+1) == '1' ) { PORTC |= (1 << XSCK_BIT) ; }
}
/* control load signal */
if ( cmd == 'L' ) {
PORTC &= ~(1 << XLOAD_BIT) ;
if ( *(sbuf+1) == '1' ) { PORTC |= (1 << XLOAD_BIT) ; }
}
/* send data to DAC */
if ( cmd == 'S' ) {
/* get 12 bits data */
xregx = 0 ;
xregx = xregx * 10 + get_hex( *(sbuf+1) ) ;
xregx = xregx * 10 + get_hex( *(sbuf+2) ) ;
xregx = xregx * 10 + get_hex( *(sbuf+3) ) ;
xregx = xregx * 10 + get_hex( *(sbuf+4) ) ;
/* judge channel */
xchx = get_hex( *(sbuf+5) ) ;
/* store */
if ( xchx ) { xchb = xregx ; }
else { xcha = xregx ; }
/* impress */
send_dac_data(xchx,xregx);
}
/* show both values */
if ( cmd == 'A' ) {
/* channel 0 */
Serial.println( xcha );
/* channel 1 */
Serial.println( xchb );
}
}
}
void send_dac_data(byte xch,word x)
{
byte ii ;
word tmp ;
/* generate code */
tmp = CHA | x ;
if ( xch & 1 ) { tmp = CHB | x ; }
/* enable chip select */
PORTC &= ~(1 << CS0_BIT) ;
/* repeat */
for ( ii = 0 ; ii < 16 ; ii++ ) {
/* impress data */
PORTC &= ~(1 << XMOSI_BIT) ;
if ( tmp & MASK8000 ) { PORTC |= (1 << XMOSI_BIT) ; }
/* clock : H */
PORTC |= (1 << XSCK_BIT) ;
/* shift */
tmp <<= 1 ;
/* clock : L */
PORTC &= ~(1 << XSCK_BIT) ;
}
/* disable chip select */
PORTC |= (1 << CS0_BIT) ;
/* send latch pulse */
PORTC &= ~(1 << XLOAD_BIT) ;
delayMicroseconds(XDELAY);
PORTC |= (1 << XLOAD_BIT) ;
}
/* receive interrupt */
void serialEvent()
{
char ch;
if ( Serial.available() > 0 ) {
/* get 1 character */
ch = Serial.read();
/* store */
*(sbuf+sindex) = ch ;
/* increment */
sindex++ ;
/* judge */
if ( ch == '\r' ) {
sindex = 0 ;
sflag = ON ;
}
}
}
byte get_hex(char x)
{
byte result ;
/* default */
result = 0 ;
/* judge */
if ( '0' <= x && x <= '9' ) { result = x - '0' ; }
if ( 'A' <= x && x <= 'F' ) { result = x - 'A' + 10 ; }
if ( 'a' <= x && x <= 'f' ) { result = x - 'a' + 10 ; }
return result ;
}
Arduinoから出力する信号nCS0、SDI、SCK、nLOADを
各々0か1に設定できるようにしました。
各信号を担当するコマンドを用意し、それらの
ピンの論理値が仕様通りかを確認後、DACチップ
にパラメータを転送し、出力電圧を確認しました。
コマンドを用意し、次の仕様で使えるように設定。
Arduinoのスケッチは、以下。
#include <MsTimer2.h>
#define OFF 0
#define ON OFF+1
#define MASK8000 0x8000
#define CHA 0x7000
#define CHB 0xf000
#define XDELAY 5
#define TDX 11
/* pin assignment */
#define TRG0_BIT 2
#define TRG1_BIT 4
#define TRG2_BIT 7
#define TRG3_BIT 0
#define ECHO0_BIT 3
#define ECHO1_BIT 5
#define ECHO2_BIT 6
#define ECHO3_BIT 9
#define CS0_BIT 0
#define CS1_BIT 1
#define XSCK_BIT 2
#define XMOSI_BIT 3
#define XLOAD_BIT 4
#define DLEDX 5
#define XTIMOUT 13000
/* global variables */
volatile byte xcnt ;
volatile unsigned long dtime[4] ;
volatile word dacv[4] ;
volatile word dacvx[4] ;
volatile byte eflag ;
/* function prototype */
void send_dac_primitive(byte which,word xa,word xb);
void send_dac(void);
void send_led(byte x);
void send_trg(byte x);
unsigned long get_duration(byte x);
word convertv(unsigned long x);
void update_trigger(void);
void setup()
{
byte i ;
/* set initial state */
PORTB = 0x00 ;
PORTC = 0x13 ;
PORTD = 0x00 ;
/* define digital pin */
DDRB = 0xfd ;
DDRC = 0xff ; /* all outputs */
DDRD = 0x96 ;
/* clear flag */
eflag = OFF ;
/* clear variable */
xcnt = 0 ;
for ( i = 0 ; i < 4 ; i++ ) {
*(dacv+i) = 0 ;
*(dacvx+i) = 4000 ;
}
/* initialize DAC */
send_dac();
/* 100ms period */
MsTimer2::set(100,update_trigger);
/* enable */
MsTimer2::start();
}
void loop()
{
byte i ;
/* scan */
if ( eflag == ON ) {
/* clear flag */
eflag = OFF ;
/* sensing */
for ( i = 0 ; i < 4 ; i++ ) {
/* trigger */
send_trg(i) ;
/* measure */
*(dtime+i) = get_duration( i );
/* wait 1ms */
delay( 1 ) ;
}
/* calculate */
for ( i = 0 ; i < 4 ; i++ ) { *(dacvx+i) = convertv(*(dtime+i)) ; }
/* send data to DAC */
send_dac();
}
}
void send_dac_primitive(byte which,word xa,word xb)
{
word tmp ;
byte i ;
byte j ;
/* judge */
if ( which > 1 ) return ;
/* disable chips */
PORTC |= 0x03 ;
/* double transfer */
for ( j = 0 ; j < 2 ; j++ ) {
/* generate code */
tmp = (CHA | (xa & 0x0fff)) ;
if ( j == 1 ) { tmp = (CHB | (xb & 0x0fff)) ; }
/* enable chip select */
if ( which == 0 ) { PORTC &= ~(1 << CS0_BIT) ; }
if ( which == 1 ) { PORTC &= ~(1 << CS1_BIT) ; }
/* bit transfer */
for ( i = 0 ; i < 16 ; i++ ) {
/* impress data */
PORTC &= ~(1 << XMOSI_BIT) ;
if ( tmp & MASK8000 ) { PORTC |= (1 << XMOSI_BIT) ; }
delayMicroseconds(1);
/* SCK : H */
PORTC |= (1 << XSCK_BIT) ;
/* shift */
tmp <<= 1 ;
/* SCK : L */
PORTC &= ~(1 << XSCK_BIT) ;
}
/* disable chip select */
PORTC |= 0x03 ;
delayMicroseconds(1);
}
}
void send_dac(void)
{
byte j ;
/* update */
for ( j = 0 ; j < 4 ; j++ ) {
if ( *(dacv+j) != *(dacvx+j) ) { *(dacv+j) = *(dacvx+j) ; }
}
/* send chip0 */
send_dac_primitive(0,*(dacv+0),*(dacv+1));
/* send chip1 */
send_dac_primitive(1,*(dacv+2),*(dacv+3));
/* impress DAC */
PORTC &= ~(1 << XLOAD_BIT) ;
delayMicroseconds(1);
PORTC |= (1 << XLOAD_BIT) ;
}
void send_led(byte x)
{
if ( x ) { PORTB |= (1 << DLEDX) ; }
else { PORTB &= ~(1 << DLEDX) ; }
}
void send_trg(byte x)
{
/* send trigger (H) */
if ( x == 0 ) { PORTD |= (1 << TRG0_BIT) ; }
if ( x == 1 ) { PORTD |= (1 << TRG1_BIT) ; }
if ( x == 2 ) { PORTD |= (1 << TRG2_BIT) ; }
if ( x == 3 ) { PORTB |= (1 << TRG3_BIT) ; }
/* greater than 11us */
delayMicroseconds(TDX);
/* send trigger (L) */
if ( x == 0 ) { PORTD &= ~(1 << TRG0_BIT) ; }
if ( x == 1 ) { PORTD &= ~(1 << TRG1_BIT) ; }
if ( x == 2 ) { PORTD &= ~(1 << TRG2_BIT) ; }
if ( x == 3 ) { PORTB &= ~(1 << TRG3_BIT) ; }
delayMicroseconds(1);
}
unsigned long get_duration(byte x)
{
unsigned long result ;
/* default */
result = 0 ;
/* judge */
if ( x == 0 ) { result = pulseIn(ECHO0_BIT,HIGH,XTIMOUT); }
if ( x == 1 ) { result = pulseIn(ECHO1_BIT,HIGH,XTIMOUT); }
if ( x == 2 ) { result = pulseIn(ECHO2_BIT,HIGH,XTIMOUT); }
if ( x == 3 ) { result = pulseIn(ECHO3_BIT,HIGH,XTIMOUT); }
return result ;
}
word convertv(unsigned long x)
{
word result ;
/* default */
result = 4000 ;
/*
bitween distance with mili meter format
1000us : 170mm = x : 1mm
x = (100 / 17)us <- 1mm
*/
if ( 0 < x && x < 2353 ) { result = word( (17.0 * x) / 10 ) ; }
return result ;
}
void update_trigger(void)
{
eflag = ON ;
xcnt++ ;
send_led( xcnt & ON );
}
利用D/Aコンバータは、MCP4922ですが
1個¥200くらいで入手できます。
物体とArduino間の距離が400mmになると
最大値4000を設定しています。この部分
は、最大4095まで設定できるので、走行
させてから、範囲を確定します。
一度測定が終わると、60ms以上時間をおいて
測定にしないといけないようです。
ゲートが開いたのか否かの判定は、1秒くらいで
よいので、スタートゲートセンサーとしての問題
は、ないでしょう。
D/Aコンバータの動作を調べたArduinoのスケッチは以下。
#define OFF 0
#define ON OFF+1
#define MASK8000 0x8000
#define CHA 0x7000
#define CHB 0xf000
#define XDELAY 6
/* pin assignment */
#define CS0_BIT 0
#define CS1_BIT 1
#define XSCK_BIT 2
#define XMOSI_BIT 3
#define XLOAD_BIT 4
volatile byte sflag ;
volatile byte sindex ;
volatile byte sbuf[8] ;
volatile byte cmd ;
volatile word xregx ;
volatile word xchx ;
volatile word xcha ;
volatile word xchb ;
void send_dac_data(byte xch,word x);
void show_help();
byte get_hex(char x);
void show_help()
{
Serial.println("? help");
Serial.println("C set or clear Chip Select");
Serial.println("I set or clear SI signal");
Serial.println("K set or clear SCK signal");
Serial.println("L set or clear LOAD signal");
Serial.println("S set DAC value 0000-4095(integer)");
Serial.println("A show both values");
}
void setup()
{
/* initialize serial */
Serial.begin(9600);
/* define digital pin */
DDRD = 0x96 ;
DDRB = 0xfd ;
DDRC = 0xff ; /* all outputs */
/* set initial state */
PORTD = 0x00 ;
PORTB = 0x00 ;
PORTC = 0x13 ;
/* clear event flag */
sflag = OFF ;
/* clear variables */
xregx = 0 ;
xcha = 0 ;
xchb = 0 ;
}
void loop()
{
/* command interpreter */
if ( sflag == ON ) {
/* clear flag */
sflag = OFF ;
/* new line */
Serial.println("");
/* get command */
cmd = *(sbuf+sindex);
/* help */
if ( cmd == '?' ) { show_help() ; }
/* control chip select signal */
if ( cmd == 'C' ) {
PORTC &= ~(1 << CS0_BIT) ;
if ( *(sbuf+1) == '1' ) { PORTC |= (1 << CS0_BIT) ; }
}
/* control data signal */
if ( cmd == 'D' ) {
PORTC &= ~(1 << XMOSI_BIT) ;
if ( *(sbuf+1) == '1' ) { PORTC |= (1 << XMOSI_BIT) ; }
}
/* control sck signal */
if ( cmd == 'K' ) {
PORTC &= ~(1 << XSCK_BIT) ;
if ( *(sbuf+1) == '1' ) { PORTC |= (1 << XSCK_BIT) ; }
}
/* control load signal */
if ( cmd == 'L' ) {
PORTC &= ~(1 << XLOAD_BIT) ;
if ( *(sbuf+1) == '1' ) { PORTC |= (1 << XLOAD_BIT) ; }
}
/* send data to DAC */
if ( cmd == 'S' ) {
/* get 12 bits data */
xregx = 0 ;
xregx = xregx * 10 + get_hex( *(sbuf+1) ) ;
xregx = xregx * 10 + get_hex( *(sbuf+2) ) ;
xregx = xregx * 10 + get_hex( *(sbuf+3) ) ;
xregx = xregx * 10 + get_hex( *(sbuf+4) ) ;
/* judge channel */
xchx = get_hex( *(sbuf+5) ) ;
/* store */
if ( xchx ) { xchb = xregx ; }
else { xcha = xregx ; }
/* impress */
send_dac_data(xchx,xregx);
}
/* show both values */
if ( cmd == 'A' ) {
/* channel 0 */
Serial.println( xcha );
/* channel 1 */
Serial.println( xchb );
}
}
}
void send_dac_data(byte xch,word x)
{
byte ii ;
word tmp ;
/* generate code */
tmp = CHA | x ;
if ( xch & 1 ) { tmp = CHB | x ; }
/* enable chip select */
PORTC &= ~(1 << CS0_BIT) ;
/* repeat */
for ( ii = 0 ; ii < 16 ; ii++ ) {
/* impress data */
PORTC &= ~(1 << XMOSI_BIT) ;
if ( tmp & MASK8000 ) { PORTC |= (1 << XMOSI_BIT) ; }
/* clock : H */
PORTC |= (1 << XSCK_BIT) ;
/* shift */
tmp <<= 1 ;
/* clock : L */
PORTC &= ~(1 << XSCK_BIT) ;
}
/* disable chip select */
PORTC |= (1 << CS0_BIT) ;
/* send latch pulse */
PORTC &= ~(1 << XLOAD_BIT) ;
delayMicroseconds(XDELAY);
PORTC |= (1 << XLOAD_BIT) ;
}
/* receive interrupt */
void serialEvent()
{
char ch;
if ( Serial.available() > 0 ) {
/* get 1 character */
ch = Serial.read();
/* store */
*(sbuf+sindex) = ch ;
/* increment */
sindex++ ;
/* judge */
if ( ch == '\r' ) {
sindex = 0 ;
sflag = ON ;
}
}
}
byte get_hex(char x)
{
byte result ;
/* default */
result = 0 ;
/* judge */
if ( '0' <= x && x <= '9' ) { result = x - '0' ; }
if ( 'A' <= x && x <= 'F' ) { result = x - 'A' + 10 ; }
if ( 'a' <= x && x <= 'f' ) { result = x - 'a' + 10 ; }
return result ;
}
Arduinoから出力する信号nCS0、SDI、SCK、nLOADを
各々0か1に設定できるようにしました。
各信号を担当するコマンドを用意し、それらの
ピンの論理値が仕様通りかを確認後、DACチップ
にパラメータを転送し、出力電圧を確認しました。
コマンドを用意し、次の仕様で使えるように設定。
- ? ヘルプ
- C コマンド1文字に続けて0、1を指定し、nCS0の論理値確定
- I コマンド1文字に続けて0、1を指定し、SIの出力論理値確定
- K コマンド1文字に続けて0、1を指定し、SCKの出力論理値確定
- L コマンド1文字に続けて0、1を指定し、nLOADの出力論理値確定
- S コマンド1文字に続けて0000~4095とチャネル番号0、1を与え、DACの出力電圧設定
- A 2つのチャネルに設定した値を10進数で表示
 マイクロスイッチのテストに利用するメカは
以下です。
マイクロスイッチのテストに利用するメカは
以下です。
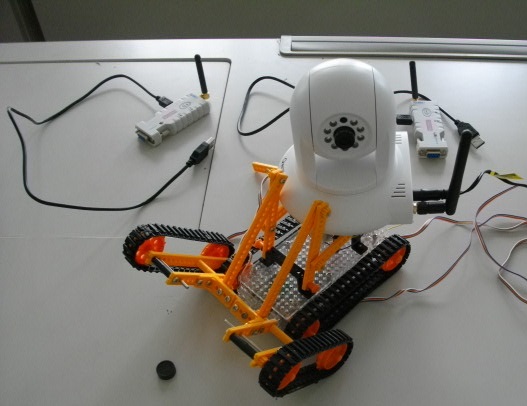 無限軌道を持ったメカが、マイクロスイッチの
ヒンジを押せば、GUI画面に接触したと文字列
を表示します。
無限軌道を持ったメカが、マイクロスイッチの
ヒンジを押せば、GUI画面に接触したと文字列
を表示します。
 MCRで利用する場合、スタートゲートがオープンか
クローズだけでよいので、次の仕様で動作する電子
回路で充分です。
トリガー出力後、3ms以内にECHOがHとなれば
ゲートはクローズ。3msを超え、ECHOがHに
なったなら、ゲートはオープン。
音速を340m/sとすると、3msでは1020mmになり
音波が往復するとすると、マシンとゲート間の
距離は510mmあることに。実際は、100mm程度に
するので、ECHOが3ms後にHになるのはゲートが
オープンと判断します。
AVRやPICのような、ピン数の少ないマイコンで
対応できますが、CPLDでも実現できます。
XC9572の中に入れるデジタル回路を作成しました。
library IEEE;
use IEEE.STD_LOGIC_1164.ALL;
use IEEE.STD_LOGIC_ARITH.ALL;
use IEEE.STD_LOGIC_UNSIGNED.ALL;
entity usensor is
port (
-- system
nRESET : in std_logic ;
CLOCK : in std_logic ; -- 4MHz
-- sensor handler signal
UTRG : out std_logic ; -- TRG
URES : in std_logic ; -- ECHO
-- gate status (1:close 0:open)
GSTATE : out std_logic ;
-- monitor
MCLK : out std_logic ;
MGSTATE: out std_logic --;
);
end usensor ;
architecture behavioral of usensor is
-- divider
signal iCLK : std_logic ;
signal iCNT : integer range 0 to 39 ;
-- 60ms generator
signal iSTRG : std_logic ;
signal iSCNT : integer range 0 to 5999 ;
-- timer out generator
signal iTOUT : std_logic ;
signal iTCNT : integer range 0 to 300 ;
-- trigger
signal iURES : std_logic ;
signal iURES_SFT : std_logic_vector(2 downto 0) ;
-- sequencer
signal iSTATE : std_logic_vector(1 downto 0) ;
signal iGSTATE : std_logic ;
begin
-- output
UTRG <= '1' when ( iSTATE = "01" ) else '0' ;
GSTATE <= iGSTATE ;
-- monitor
MCLK <= not iCLK ;
MGSTATE <= not iGSTATE ;
-- clock divider CLOCK = 4MHz
process (nRESET,CLOCK)
begin
if ( nRESET = '0' ) then
iCNT <= 0 ;
elsif rising_edge(CLOCK) then
if ( iCNT = 39 ) then
iCNT <= 0 ;
else
iCNT <= iCNT + 1 ;
end if ;
end if ;
end process ;
iCLK <= '1' when ( iCNT = 0 ) else '0' ; -- 100kHz(10us)
-- 60ms generator
process (nRESET,iCLK)
begin
if ( nRESET = '0' ) then
iSCNT <= 0 ;
elsif rising_edge(iCLK) then
if ( iSCNT = 5999 ) then
iSCNT <= 0 ;
else
iSCNT <= iSCNT + 1 ;
end if ;
end if ;
end process ;
iSTRG <= '1' when ( iSCNT = 0 ) else '0' ;
-- time out
process (nRESET,iCLK)
begin
if ( nRESET = '0' ) then
iTCNT <= 0 ;
elsif rising_edge(iCLK) then
if ( iSTATE = "01" or iTCNT = 300 ) then
iTCNT <= 0 ;
else
iTCNT <= iTCNT + 1 ;
end if ;
end if ;
end process ;
iTOUT <= '1' when ( iTCNT = 299 ) else '0' ;
-- synchronizer
process (nRESET,iCLK)
begin
if ( nRESET = '0' ) then
iURES_SFT <= "000" ;
elsif rising_edge(iCLK) then
iURES_SFT <= iURES_SFT(1 downto 0) & URES ;
end if ;
end process ;
iURES <= '1' when ( iURES_SFT = "001" ) else '0' ;
-- sequencer
process (nRESET,iCLK)
begin
if ( nRESET = '0' ) then
iSTATE <= "00" ;
iGSTATE <= '0' ;
elsif rising_edge(iCLK) then
case conv_integer(iSTATE) is
-- wait trigger
when 0 => if ( iSTRG = '1' ) then
iSTATE <= "01" ;
else
iSTATE <= "00" ;
end if ;
-- reset and send trigger
when 1 => iSTATE <= "11" ;
-- wait trigger
when 3 => if ( iURES = '1' ) then -- answer back
iSTATE <= "10" ;
iGSTATE <= '1' ;
elsif ( iTOUT = '1' ) then -- time out
iSTATE <= "10" ;
iGSTATE <= '0' ;
else
iSTATE <= "11" ;
end if ;
-- return first state
when 2 => iSTATE <= "00" ;
-- default
when others =>
iSTATE <= "00" ;
end case ;
end if ;
end process ;
end behavioral;
シーケンサを利用し、60msごとに計測していきます。
トリガーTRGを10usだけHにし、3ms以内にECHOがHに
なるかタイムアウトするかで、ゲートの開閉情報を
出力します。
ピンアサインは、以下としました。
# system
NET "CLOCK" LOC = "P5" ;
NET "nRESET" LOC = "P39" ;
# sensor control
NET "UTRG" LOC = "P1" ;
NET "URES" LOC = "P2" ;
NET "MCLK" LOC = "P9" ; # monitor
# gate state
NET "GSTATE" LOC = "P11" ;
NET "MGSTATE" LOC = "P12" ; # monitor
京都のIさんが、送ってくれた超音波センサの基板。
MCRで利用する場合、スタートゲートがオープンか
クローズだけでよいので、次の仕様で動作する電子
回路で充分です。
トリガー出力後、3ms以内にECHOがHとなれば
ゲートはクローズ。3msを超え、ECHOがHに
なったなら、ゲートはオープン。
音速を340m/sとすると、3msでは1020mmになり
音波が往復するとすると、マシンとゲート間の
距離は510mmあることに。実際は、100mm程度に
するので、ECHOが3ms後にHになるのはゲートが
オープンと判断します。
AVRやPICのような、ピン数の少ないマイコンで
対応できますが、CPLDでも実現できます。
XC9572の中に入れるデジタル回路を作成しました。
library IEEE;
use IEEE.STD_LOGIC_1164.ALL;
use IEEE.STD_LOGIC_ARITH.ALL;
use IEEE.STD_LOGIC_UNSIGNED.ALL;
entity usensor is
port (
-- system
nRESET : in std_logic ;
CLOCK : in std_logic ; -- 4MHz
-- sensor handler signal
UTRG : out std_logic ; -- TRG
URES : in std_logic ; -- ECHO
-- gate status (1:close 0:open)
GSTATE : out std_logic ;
-- monitor
MCLK : out std_logic ;
MGSTATE: out std_logic --;
);
end usensor ;
architecture behavioral of usensor is
-- divider
signal iCLK : std_logic ;
signal iCNT : integer range 0 to 39 ;
-- 60ms generator
signal iSTRG : std_logic ;
signal iSCNT : integer range 0 to 5999 ;
-- timer out generator
signal iTOUT : std_logic ;
signal iTCNT : integer range 0 to 300 ;
-- trigger
signal iURES : std_logic ;
signal iURES_SFT : std_logic_vector(2 downto 0) ;
-- sequencer
signal iSTATE : std_logic_vector(1 downto 0) ;
signal iGSTATE : std_logic ;
begin
-- output
UTRG <= '1' when ( iSTATE = "01" ) else '0' ;
GSTATE <= iGSTATE ;
-- monitor
MCLK <= not iCLK ;
MGSTATE <= not iGSTATE ;
-- clock divider CLOCK = 4MHz
process (nRESET,CLOCK)
begin
if ( nRESET = '0' ) then
iCNT <= 0 ;
elsif rising_edge(CLOCK) then
if ( iCNT = 39 ) then
iCNT <= 0 ;
else
iCNT <= iCNT + 1 ;
end if ;
end if ;
end process ;
iCLK <= '1' when ( iCNT = 0 ) else '0' ; -- 100kHz(10us)
-- 60ms generator
process (nRESET,iCLK)
begin
if ( nRESET = '0' ) then
iSCNT <= 0 ;
elsif rising_edge(iCLK) then
if ( iSCNT = 5999 ) then
iSCNT <= 0 ;
else
iSCNT <= iSCNT + 1 ;
end if ;
end if ;
end process ;
iSTRG <= '1' when ( iSCNT = 0 ) else '0' ;
-- time out
process (nRESET,iCLK)
begin
if ( nRESET = '0' ) then
iTCNT <= 0 ;
elsif rising_edge(iCLK) then
if ( iSTATE = "01" or iTCNT = 300 ) then
iTCNT <= 0 ;
else
iTCNT <= iTCNT + 1 ;
end if ;
end if ;
end process ;
iTOUT <= '1' when ( iTCNT = 299 ) else '0' ;
-- synchronizer
process (nRESET,iCLK)
begin
if ( nRESET = '0' ) then
iURES_SFT <= "000" ;
elsif rising_edge(iCLK) then
iURES_SFT <= iURES_SFT(1 downto 0) & URES ;
end if ;
end process ;
iURES <= '1' when ( iURES_SFT = "001" ) else '0' ;
-- sequencer
process (nRESET,iCLK)
begin
if ( nRESET = '0' ) then
iSTATE <= "00" ;
iGSTATE <= '0' ;
elsif rising_edge(iCLK) then
case conv_integer(iSTATE) is
-- wait trigger
when 0 => if ( iSTRG = '1' ) then
iSTATE <= "01" ;
else
iSTATE <= "00" ;
end if ;
-- reset and send trigger
when 1 => iSTATE <= "11" ;
-- wait trigger
when 3 => if ( iURES = '1' ) then -- answer back
iSTATE <= "10" ;
iGSTATE <= '1' ;
elsif ( iTOUT = '1' ) then -- time out
iSTATE <= "10" ;
iGSTATE <= '0' ;
else
iSTATE <= "11" ;
end if ;
-- return first state
when 2 => iSTATE <= "00" ;
-- default
when others =>
iSTATE <= "00" ;
end case ;
end if ;
end process ;
end behavioral;
シーケンサを利用し、60msごとに計測していきます。
トリガーTRGを10usだけHにし、3ms以内にECHOがHに
なるかタイムアウトするかで、ゲートの開閉情報を
出力します。
ピンアサインは、以下としました。
# system
NET "CLOCK" LOC = "P5" ;
NET "nRESET" LOC = "P39" ;
# sensor control
NET "UTRG" LOC = "P1" ;
NET "URES" LOC = "P2" ;
NET "MCLK" LOC = "P9" ; # monitor
# gate state
NET "GSTATE" LOC = "P11" ;
NET "MGSTATE" LOC = "P12" ; # monitor
京都のIさんが、送ってくれた超音波センサの基板。
 この基板を利用した動作チェックは、次のスケッチを使いました。
#include <MsTimer2.h>
#define OFF 0
#define ON OFF+1
#define MASK8000 0x8000
#define CHA 0x7000
#define CHB 0xf000
#define XDELAY 5
/* pin assignment */
#define TRG0_BIT 2
#define TRG1_BIT 4
#define TRG2_BIT 7
#define TRG3_BIT 0
#define ECHO0_BIT 3
#define ECHO1_BIT 5
#define ECHO2_BIT 6
#define ECHO3_BIT 9
#define CS0_BIT 0
#define CS1_BIT 1
#define XSCK_BIT 2
#define XMOSI_BIT 3
#define XLOAD_BIT 4
#define DLEDX 5
#define XTIMOUT 20000
#define TDX 11
#define SRECORDMAX 30
#define OFFSET 2
volatile unsigned long d0[SRECORDMAX] ;
volatile unsigned long d1[SRECORDMAX] ;
volatile unsigned long d2[SRECORDMAX] ;
volatile unsigned long d3[SRECORDMAX] ;
/* global variables */
volatile byte xcnt ;
volatile word dacv[4] ;
volatile word dacvx[4] ;
volatile byte tflag ;
volatile byte uflag ;
volatile byte mflag ;
volatile byte cmd ;
volatile byte state ;
volatile byte sindex ;
volatile char sbuf[10] ;
void send_dac_primitive(byte which,word xa,word xb);
void send_dac(void);
void send_led(byte x);
void send_trg(byte x);
unsigned long get_duration(byte x);
word convertv(unsigned long x);
void rs_putchar(char x);
void rs_puts(char *x);
void crlf(void);
void show_digit4(word x);
void show_help(void);
byte get_hex(char x);
void update_trigger(void)
{
tflag = ON ;
send_led( xcnt & ON );
xcnt++ ;
}
word calcx(word x);
void setup()
{
byte i ;
/* use serial terminal */
Serial.begin(9600);
/* set initial state */
PORTB = 0b00000000 ;
PORTC = 0b00011111 ;
PORTD = 0b00000001 ;
/* define digital pin */
DDRB = 0b11111101 ;
DDRC = 0b11111111 ; /* all outputs */
DDRD = 0b10010110 ;
/* clear flags */
tflag = OFF ;
mflag = OFF ;
uflag = OFF ;
/* initialize variables */
sindex = 0 ;
state = SRECORDMAX ;
xcnt = 0 ;
{
for ( i = 0 ; i < 4 ; i++ ) {
*(dacv+i) = 0 ;
*(dacvx+i) = 4000 ;
}
/* initialize DAC */
send_dac();
}
/* 1000ms period */
MsTimer2::set(1000,update_trigger);
/* enable */
MsTimer2::start();
}
void loop()
{
byte i ;
byte j ;
word dv ;
unsigned long dtime[4] ;
/* command interpreter */
if ( uflag == ON ) {
/* clear flag */
uflag = OFF ;
/* new line */
crlf();
/* get command */
cmd = *(sbuf+0) ;
/* help */
if ( cmd == '?' ) { show_help() ; }
/* start measure */
if ( cmd == 'B' ) {
state = 0 ;
mflag = ON ;
rs_puts("Start ");
}
/* set DAC */
if ( cmd == 'D' ) {
/* get channel number */
i = get_hex( *(sbuf+1) );
/* get value */
dv = 0 ;
for ( j = 0 ; j < 4 ; j++ ) {
if ( *(sbuf+j+2) == '\r' ) break ;
dv *= 10 ;
dv += get_hex( *(sbuf+j+2) );
}
/* judge */
if ( dv > 4095 ) {
rs_puts("out of range !");
crlf();
}
/* store and show */
if ( i < 4 ) { *(dacvx+i) = dv ; }
/* send data to DAC */
send_dac();
}
/* show DAC values */
if ( cmd == 'd' ) {
for ( j = 0 ; j < 4 ; j++ ) {
rs_putchar(' '); Serial.print( j ) ;
rs_putchar(' '); Serial.print( *(dacvx+j) ) ;
crlf();
}
}
/* show records */
if ( cmd == 'S' || cmd == 'R' ) {
for ( i = 0 ; i < SRECORDMAX ; i++ ) {
/* copy */
*(dtime+0) = *(d0+i) ;
*(dtime+1) = *(d1+i) ;
*(dtime+2) = *(d2+i) ;
*(dtime+3) = *(d3+i) ;
/* repeat */
if ( cmd == 'R' ) {
/* copy */
*(dacvx+0) = convertv( *(d0+i) ) ;
*(dacvx+1) = convertv( *(d1+i) ) ;
*(dacvx+2) = convertv( *(d2+i) ) ;
*(dacvx+3) = convertv( *(d3+i) ) ;
/* DAC handling */
send_dac() ;
/* */
delay( 1000 ) ;
}
/* show */
if ( i < 10 ) { rs_putchar(' ') ; }
rs_putchar('<');
Serial.print( i ) ;
rs_putchar('>');
for ( j = 0 ; j < 4 ; j++ ) {
rs_putchar(' ');
show_digit4( *(dtime+j) );
rs_putchar('-');
show_digit4( convertv(*(dtime+j)) );
}
crlf() ;
}
if ( cmd == 'R' ) {
rs_putchar('\t');
rs_puts("Exit repeat") ;
crlf();
}
}
if ( cmd == 'F' ) {
/* get channel */
i = get_hex( *(sbuf+1) );
/* get value */
dv = 0 ;
for ( j = 0 ; j < 4 ; j++ ) {
if ( *(sbuf+j+4) == '\r' ) break ;
dv *= 10 ;
dv += get_hex( *(sbuf+j+4) );
}
/* get location */
j = 10 * get_hex( *(sbuf+2) ) + get_hex( *(sbuf+3) ) ;
/* fill */
if ( j < SRECORDMAX ) {
if ( i == 0 ) { *(d0+j) = dv ; }
if ( i == 1 ) { *(d1+j) = dv ; }
if ( i == 2 ) { *(d2+j) = dv ; }
if ( i == 3 ) { *(d3+j) = dv ; }
}
}
}
/* scan */
if ( tflag == ON ) {
/* clear flag */
tflag = OFF ;
/* measure */
if ( mflag == ON ) {
for ( i = 0 ; i < 4 ; i++ ) {
/* trigger */
send_trg( i ) ;
/* duration */
*(dtime+i) = get_duration( i ) ;
/* convert */
*(dacvx+i) = convertv( *(dtime+i) ) ;
/* 1ms */
delay( 1 ) ;
}
/* send data to DAC */
send_dac();
}
/* store */
if ( state < SRECORDMAX ) {
/* copy */
*(d0+state) = *(dtime+0) ;
*(d1+state) = *(dtime+1) ;
*(d2+state) = *(dtime+2) ;
*(d3+state) = *(dtime+3) ;
/* monitor */
i = '+' ;
if ( state & ON ) { i = '-' ; }
rs_putchar( i );
/* update */
state++ ;
if ( state == SRECORDMAX ) {
rs_puts(" Complete !");
crlf();
mflag = OFF ;
}
}
}
}
void send_dac_primitive(byte which,word xa,word xb)
{
word tmp ;
byte i ;
byte j ;
/* judge */
if ( which > 1 ) return ;
/* disable chips */
PORTC |= 0x03 ;
/* double transfer */
for ( j = 0 ; j < 2 ; j++ ) {
/* generate code */
tmp = (CHA | (xa & 0x0fff)) ;
if ( j == 1 ) { tmp = (CHB | (xb & 0x0fff)) ; }
/* enable chip select */
if ( which == 0 ) { PORTC &= ~(1 << CS0_BIT) ; }
if ( which == 1 ) { PORTC &= ~(1 << CS1_BIT) ; }
/* bit transfer */
for ( i = 0 ; i < 16 ; i++ ) {
/* impress data */
PORTC &= ~(1 << XMOSI_BIT) ;
if ( tmp & MASK8000 ) { PORTC |= (1 << XMOSI_BIT) ; }
/* SCK : H */
PORTC |= (1 << XSCK_BIT) ;
/* shift */
tmp <<= 1 ;
/* SCK : L */
PORTC &= ~(1 << XSCK_BIT) ;
}
/* disable chip select */
PORTC |= 0x03 ;
}
}
void send_dac(void)
{
byte j ;
word msgx[4] ;
/* update */
for ( j = 0 ; j < 4 ; j++ ) {
if ( *(dacv+j) != *(dacvx+j) ) { *(dacv+j) = *(dacvx+j) ; }
}
/* adjust */
*(msgx+0) = calcx( *(dacv+0) );
*(msgx+1) = calcx( *(dacv+1) );
*(msgx+2) = calcx( *(dacv+2) );
*(msgx+3) = calcx( *(dacv+3) );
/* send chip0 */
send_dac_primitive(0,*(msgx+0),*(msgx+1));
/* send chip1 */
send_dac_primitive(1,*(msgx+2),*(msgx+3));
/* impress DAC */
PORTC &= ~(1 << XLOAD_BIT) ;
delayMicroseconds(1);
PORTC |= (1 << XLOAD_BIT) ;
}
void send_led(byte x)
{
if ( x ) { PORTB |= (1 << DLEDX) ; }
else { PORTB &= ~(1 << DLEDX) ; }
}
void send_trg(byte x)
{
/* send trigger (H) */
if ( x == 0 ) { PORTD |= (1 << TRG0_BIT) ; }
if ( x == 1 ) { PORTD |= (1 << TRG1_BIT) ; }
if ( x == 2 ) { PORTD |= (1 << TRG2_BIT) ; }
if ( x == 3 ) { PORTB |= (1 << TRG3_BIT) ; }
/* greater than 11us */
delayMicroseconds(TDX);
/* send trigger (L) */
if ( x == 0 ) { PORTD &= ~(1 << TRG0_BIT) ; }
if ( x == 1 ) { PORTD &= ~(1 << TRG1_BIT) ; }
if ( x == 2 ) { PORTD &= ~(1 << TRG2_BIT) ; }
if ( x == 3 ) { PORTB &= ~(1 << TRG3_BIT) ; }
delayMicroseconds(1);
}
unsigned long get_duration(byte x)
{
unsigned long result ;
/* default */
result = 0 ;
/* handling */
if ( x == 0 ) { result = pulseIn(ECHO0_BIT,HIGH,XTIMOUT); }
if ( x == 1 ) { result = pulseIn(ECHO1_BIT,HIGH,XTIMOUT); }
if ( x == 2 ) { result = pulseIn(ECHO2_BIT,HIGH,XTIMOUT); }
if ( x == 3 ) { result = pulseIn(ECHO3_BIT,HIGH,XTIMOUT); }
return result ;
}
word convertv(unsigned long x)
{
word dv ;
/* bitween distance with mili meter format
1000us : 170mm = x : 1mm
x = (100 / 17)us <- 1mm
check range (over 400mm)
*/
dv = 4000 ;
if ( 0 < x && x < 2353 ) { dv = word( (17.0 * x) / 10 ) + OFFSET ; }
return dv ;
}
void rs_putchar(char x)
{
Serial.write(x);
}
void rs_puts(char *x)
{
while ( *x ) {
rs_putchar(*x);
x++ ;
}
}
void crlf(void)
{
rs_putchar('\r');
rs_putchar('\n');
}
void show_digit4(word x)
{
char msg[4] ;
char i ;
/* separate */
for ( i = 0 ; i < 4 ; i++ ) {
*(msg+3-i) = x % 10 + '0' ;
x /= 10 ;
}
/* zero suppress */
if ( *(msg+0) == '0' ) {
*(msg+0) = ' ' ;
if ( *(msg+1) == '0' ) {
*(msg+1) = ' ' ;
if ( *(msg+2) == '0' ) { *(msg+2) = ' ' ; }
}
}
/* send */
for ( i = 0 ; i < 4 ; i++ ) { rs_putchar( *(msg+i) ); }
}
void show_help(void)
{
rs_puts("? help"); crlf();
rs_puts("B start measure"); crlf();
rs_puts("D put data to DAC"); crlf();
rs_puts("d show DAC values"); crlf();
rs_puts("S show measure record"); crlf();
rs_puts("F put value"); crlf();
rs_puts("R repeat"); crlf();
}
byte get_hex(char x)
{
byte result ;
/* default */
result = 0 ;
/* convert */
if ( '0' <= x && x <= '9' ) { result = x - '0' ; }
if ( 'A' <= x && x <= 'F' ) { result = x - 'A' + 10 ; }
if ( 'a' <= x && x <= 'f' ) { result = x - 'a' + 10 ; }
return result ;
}
/* receive interrupt */
void serialEvent()
{
char ch;
if ( Serial.available() > 0 ) {
/* get 1 character */
ch = Serial.read();
/* store */
*(sbuf+sindex) = ch ;
/* increment */
sindex++ ;
/* judge */
if ( ch == '\r' ) {
sindex = 0 ;
uflag = ON ;
}
}
}
word calcx(word x)
{
word result ;
result = word( ((x * 4096.0) / 5000) );
return result;
}
コマンドは、次のようにして端末ソフトで計測とプレイバック
ができるようにしてあります。
この基板を利用した動作チェックは、次のスケッチを使いました。
#include <MsTimer2.h>
#define OFF 0
#define ON OFF+1
#define MASK8000 0x8000
#define CHA 0x7000
#define CHB 0xf000
#define XDELAY 5
/* pin assignment */
#define TRG0_BIT 2
#define TRG1_BIT 4
#define TRG2_BIT 7
#define TRG3_BIT 0
#define ECHO0_BIT 3
#define ECHO1_BIT 5
#define ECHO2_BIT 6
#define ECHO3_BIT 9
#define CS0_BIT 0
#define CS1_BIT 1
#define XSCK_BIT 2
#define XMOSI_BIT 3
#define XLOAD_BIT 4
#define DLEDX 5
#define XTIMOUT 20000
#define TDX 11
#define SRECORDMAX 30
#define OFFSET 2
volatile unsigned long d0[SRECORDMAX] ;
volatile unsigned long d1[SRECORDMAX] ;
volatile unsigned long d2[SRECORDMAX] ;
volatile unsigned long d3[SRECORDMAX] ;
/* global variables */
volatile byte xcnt ;
volatile word dacv[4] ;
volatile word dacvx[4] ;
volatile byte tflag ;
volatile byte uflag ;
volatile byte mflag ;
volatile byte cmd ;
volatile byte state ;
volatile byte sindex ;
volatile char sbuf[10] ;
void send_dac_primitive(byte which,word xa,word xb);
void send_dac(void);
void send_led(byte x);
void send_trg(byte x);
unsigned long get_duration(byte x);
word convertv(unsigned long x);
void rs_putchar(char x);
void rs_puts(char *x);
void crlf(void);
void show_digit4(word x);
void show_help(void);
byte get_hex(char x);
void update_trigger(void)
{
tflag = ON ;
send_led( xcnt & ON );
xcnt++ ;
}
word calcx(word x);
void setup()
{
byte i ;
/* use serial terminal */
Serial.begin(9600);
/* set initial state */
PORTB = 0b00000000 ;
PORTC = 0b00011111 ;
PORTD = 0b00000001 ;
/* define digital pin */
DDRB = 0b11111101 ;
DDRC = 0b11111111 ; /* all outputs */
DDRD = 0b10010110 ;
/* clear flags */
tflag = OFF ;
mflag = OFF ;
uflag = OFF ;
/* initialize variables */
sindex = 0 ;
state = SRECORDMAX ;
xcnt = 0 ;
{
for ( i = 0 ; i < 4 ; i++ ) {
*(dacv+i) = 0 ;
*(dacvx+i) = 4000 ;
}
/* initialize DAC */
send_dac();
}
/* 1000ms period */
MsTimer2::set(1000,update_trigger);
/* enable */
MsTimer2::start();
}
void loop()
{
byte i ;
byte j ;
word dv ;
unsigned long dtime[4] ;
/* command interpreter */
if ( uflag == ON ) {
/* clear flag */
uflag = OFF ;
/* new line */
crlf();
/* get command */
cmd = *(sbuf+0) ;
/* help */
if ( cmd == '?' ) { show_help() ; }
/* start measure */
if ( cmd == 'B' ) {
state = 0 ;
mflag = ON ;
rs_puts("Start ");
}
/* set DAC */
if ( cmd == 'D' ) {
/* get channel number */
i = get_hex( *(sbuf+1) );
/* get value */
dv = 0 ;
for ( j = 0 ; j < 4 ; j++ ) {
if ( *(sbuf+j+2) == '\r' ) break ;
dv *= 10 ;
dv += get_hex( *(sbuf+j+2) );
}
/* judge */
if ( dv > 4095 ) {
rs_puts("out of range !");
crlf();
}
/* store and show */
if ( i < 4 ) { *(dacvx+i) = dv ; }
/* send data to DAC */
send_dac();
}
/* show DAC values */
if ( cmd == 'd' ) {
for ( j = 0 ; j < 4 ; j++ ) {
rs_putchar(' '); Serial.print( j ) ;
rs_putchar(' '); Serial.print( *(dacvx+j) ) ;
crlf();
}
}
/* show records */
if ( cmd == 'S' || cmd == 'R' ) {
for ( i = 0 ; i < SRECORDMAX ; i++ ) {
/* copy */
*(dtime+0) = *(d0+i) ;
*(dtime+1) = *(d1+i) ;
*(dtime+2) = *(d2+i) ;
*(dtime+3) = *(d3+i) ;
/* repeat */
if ( cmd == 'R' ) {
/* copy */
*(dacvx+0) = convertv( *(d0+i) ) ;
*(dacvx+1) = convertv( *(d1+i) ) ;
*(dacvx+2) = convertv( *(d2+i) ) ;
*(dacvx+3) = convertv( *(d3+i) ) ;
/* DAC handling */
send_dac() ;
/* */
delay( 1000 ) ;
}
/* show */
if ( i < 10 ) { rs_putchar(' ') ; }
rs_putchar('<');
Serial.print( i ) ;
rs_putchar('>');
for ( j = 0 ; j < 4 ; j++ ) {
rs_putchar(' ');
show_digit4( *(dtime+j) );
rs_putchar('-');
show_digit4( convertv(*(dtime+j)) );
}
crlf() ;
}
if ( cmd == 'R' ) {
rs_putchar('\t');
rs_puts("Exit repeat") ;
crlf();
}
}
if ( cmd == 'F' ) {
/* get channel */
i = get_hex( *(sbuf+1) );
/* get value */
dv = 0 ;
for ( j = 0 ; j < 4 ; j++ ) {
if ( *(sbuf+j+4) == '\r' ) break ;
dv *= 10 ;
dv += get_hex( *(sbuf+j+4) );
}
/* get location */
j = 10 * get_hex( *(sbuf+2) ) + get_hex( *(sbuf+3) ) ;
/* fill */
if ( j < SRECORDMAX ) {
if ( i == 0 ) { *(d0+j) = dv ; }
if ( i == 1 ) { *(d1+j) = dv ; }
if ( i == 2 ) { *(d2+j) = dv ; }
if ( i == 3 ) { *(d3+j) = dv ; }
}
}
}
/* scan */
if ( tflag == ON ) {
/* clear flag */
tflag = OFF ;
/* measure */
if ( mflag == ON ) {
for ( i = 0 ; i < 4 ; i++ ) {
/* trigger */
send_trg( i ) ;
/* duration */
*(dtime+i) = get_duration( i ) ;
/* convert */
*(dacvx+i) = convertv( *(dtime+i) ) ;
/* 1ms */
delay( 1 ) ;
}
/* send data to DAC */
send_dac();
}
/* store */
if ( state < SRECORDMAX ) {
/* copy */
*(d0+state) = *(dtime+0) ;
*(d1+state) = *(dtime+1) ;
*(d2+state) = *(dtime+2) ;
*(d3+state) = *(dtime+3) ;
/* monitor */
i = '+' ;
if ( state & ON ) { i = '-' ; }
rs_putchar( i );
/* update */
state++ ;
if ( state == SRECORDMAX ) {
rs_puts(" Complete !");
crlf();
mflag = OFF ;
}
}
}
}
void send_dac_primitive(byte which,word xa,word xb)
{
word tmp ;
byte i ;
byte j ;
/* judge */
if ( which > 1 ) return ;
/* disable chips */
PORTC |= 0x03 ;
/* double transfer */
for ( j = 0 ; j < 2 ; j++ ) {
/* generate code */
tmp = (CHA | (xa & 0x0fff)) ;
if ( j == 1 ) { tmp = (CHB | (xb & 0x0fff)) ; }
/* enable chip select */
if ( which == 0 ) { PORTC &= ~(1 << CS0_BIT) ; }
if ( which == 1 ) { PORTC &= ~(1 << CS1_BIT) ; }
/* bit transfer */
for ( i = 0 ; i < 16 ; i++ ) {
/* impress data */
PORTC &= ~(1 << XMOSI_BIT) ;
if ( tmp & MASK8000 ) { PORTC |= (1 << XMOSI_BIT) ; }
/* SCK : H */
PORTC |= (1 << XSCK_BIT) ;
/* shift */
tmp <<= 1 ;
/* SCK : L */
PORTC &= ~(1 << XSCK_BIT) ;
}
/* disable chip select */
PORTC |= 0x03 ;
}
}
void send_dac(void)
{
byte j ;
word msgx[4] ;
/* update */
for ( j = 0 ; j < 4 ; j++ ) {
if ( *(dacv+j) != *(dacvx+j) ) { *(dacv+j) = *(dacvx+j) ; }
}
/* adjust */
*(msgx+0) = calcx( *(dacv+0) );
*(msgx+1) = calcx( *(dacv+1) );
*(msgx+2) = calcx( *(dacv+2) );
*(msgx+3) = calcx( *(dacv+3) );
/* send chip0 */
send_dac_primitive(0,*(msgx+0),*(msgx+1));
/* send chip1 */
send_dac_primitive(1,*(msgx+2),*(msgx+3));
/* impress DAC */
PORTC &= ~(1 << XLOAD_BIT) ;
delayMicroseconds(1);
PORTC |= (1 << XLOAD_BIT) ;
}
void send_led(byte x)
{
if ( x ) { PORTB |= (1 << DLEDX) ; }
else { PORTB &= ~(1 << DLEDX) ; }
}
void send_trg(byte x)
{
/* send trigger (H) */
if ( x == 0 ) { PORTD |= (1 << TRG0_BIT) ; }
if ( x == 1 ) { PORTD |= (1 << TRG1_BIT) ; }
if ( x == 2 ) { PORTD |= (1 << TRG2_BIT) ; }
if ( x == 3 ) { PORTB |= (1 << TRG3_BIT) ; }
/* greater than 11us */
delayMicroseconds(TDX);
/* send trigger (L) */
if ( x == 0 ) { PORTD &= ~(1 << TRG0_BIT) ; }
if ( x == 1 ) { PORTD &= ~(1 << TRG1_BIT) ; }
if ( x == 2 ) { PORTD &= ~(1 << TRG2_BIT) ; }
if ( x == 3 ) { PORTB &= ~(1 << TRG3_BIT) ; }
delayMicroseconds(1);
}
unsigned long get_duration(byte x)
{
unsigned long result ;
/* default */
result = 0 ;
/* handling */
if ( x == 0 ) { result = pulseIn(ECHO0_BIT,HIGH,XTIMOUT); }
if ( x == 1 ) { result = pulseIn(ECHO1_BIT,HIGH,XTIMOUT); }
if ( x == 2 ) { result = pulseIn(ECHO2_BIT,HIGH,XTIMOUT); }
if ( x == 3 ) { result = pulseIn(ECHO3_BIT,HIGH,XTIMOUT); }
return result ;
}
word convertv(unsigned long x)
{
word dv ;
/* bitween distance with mili meter format
1000us : 170mm = x : 1mm
x = (100 / 17)us <- 1mm
check range (over 400mm)
*/
dv = 4000 ;
if ( 0 < x && x < 2353 ) { dv = word( (17.0 * x) / 10 ) + OFFSET ; }
return dv ;
}
void rs_putchar(char x)
{
Serial.write(x);
}
void rs_puts(char *x)
{
while ( *x ) {
rs_putchar(*x);
x++ ;
}
}
void crlf(void)
{
rs_putchar('\r');
rs_putchar('\n');
}
void show_digit4(word x)
{
char msg[4] ;
char i ;
/* separate */
for ( i = 0 ; i < 4 ; i++ ) {
*(msg+3-i) = x % 10 + '0' ;
x /= 10 ;
}
/* zero suppress */
if ( *(msg+0) == '0' ) {
*(msg+0) = ' ' ;
if ( *(msg+1) == '0' ) {
*(msg+1) = ' ' ;
if ( *(msg+2) == '0' ) { *(msg+2) = ' ' ; }
}
}
/* send */
for ( i = 0 ; i < 4 ; i++ ) { rs_putchar( *(msg+i) ); }
}
void show_help(void)
{
rs_puts("? help"); crlf();
rs_puts("B start measure"); crlf();
rs_puts("D put data to DAC"); crlf();
rs_puts("d show DAC values"); crlf();
rs_puts("S show measure record"); crlf();
rs_puts("F put value"); crlf();
rs_puts("R repeat"); crlf();
}
byte get_hex(char x)
{
byte result ;
/* default */
result = 0 ;
/* convert */
if ( '0' <= x && x <= '9' ) { result = x - '0' ; }
if ( 'A' <= x && x <= 'F' ) { result = x - 'A' + 10 ; }
if ( 'a' <= x && x <= 'f' ) { result = x - 'a' + 10 ; }
return result ;
}
/* receive interrupt */
void serialEvent()
{
char ch;
if ( Serial.available() > 0 ) {
/* get 1 character */
ch = Serial.read();
/* store */
*(sbuf+sindex) = ch ;
/* increment */
sindex++ ;
/* judge */
if ( ch == '\r' ) {
sindex = 0 ;
uflag = ON ;
}
}
}
word calcx(word x)
{
word result ;
result = word( ((x * 4096.0) / 5000) );
return result;
}
コマンドは、次のようにして端末ソフトで計測とプレイバック
ができるようにしてあります。
- ? ヘルプ
- B 計測開始
- D D/Aコンバータの出力値設定
- d D/Aコンバータの現在の設定値表示
- S 計測情報表示(30秒間の情報のみ)
- F 計測情報の上書き
- R 計測情報をD/Aコンバータへプレイバック
目次 前 次