目次
前
次
密着型センサー作成
MCR-VCマシンの制御ファームウエアは、BCS、GBCを
センサーに利用して、移動を実現します。
基本は、密着型センサーと同じ処理になります。
BCS、GBCのデータを利用するための資料情報が必要と
考え、ジャンク箱から密着型センサーを引っ張り出し
動かします。
ジャンク箱に眠っていた密着型センサーは、JICA研修員が
半田付けして、途中で動かなくなったものでした。
どこに不具合があるのかを、導通チェッカーで、信号線を
たどり、クラッシュにより基板に傷が入っていることを
発見。半田をつけ直し、ケーブルの接続を変更して、やっと
動くようになりました。
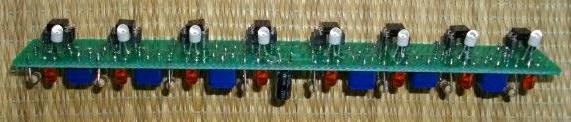
 回路は非常に単純で、次のブロックを8個並べています。
回路は非常に単純で、次のブロックを8個並べています。
 回路の動作は、赤外線を赤外線LEDから床面に照射し、反射波を
とらえます。赤外線の変調波と復調には、浜松ホトニクスのIC
(S4289-61)を利用しました。
復調した信号を、モニタするためにLEDを接続しています。
床面が白のときに、モニタLEDが点灯します。白のとき0が
出力されてくると、扱いにくいので、インバータを入れて
白のとき1になるようにしてあります。
回路の動作は、赤外線を赤外線LEDから床面に照射し、反射波を
とらえます。赤外線の変調波と復調には、浜松ホトニクスのIC
(S4289-61)を利用しました。
復調した信号を、モニタするためにLEDを接続しています。
床面が白のときに、モニタLEDが点灯します。白のとき0が
出力されてくると、扱いにくいので、インバータを入れて
白のとき1になるようにしてあります。
 このセンサーは、コース幅いっぱいになっています。
MCRの競技規定が変更になり、センサー、シャーシとも
コース幅からの、はみ出しが禁止になったので、この
センサーを使えなくなりました。
使えないセンサーボードでは、埒が明かないので
新しく、幅の狭い(140mm)のセンサーボードを
半田付けしました。
このセンサーは、コース幅いっぱいになっています。
MCRの競技規定が変更になり、センサー、シャーシとも
コース幅からの、はみ出しが禁止になったので、この
センサーを使えなくなりました。
使えないセンサーボードでは、埒が明かないので
新しく、幅の狭い(140mm)のセンサーボードを
半田付けしました。
 幅を狭くしたので、インバータを載せるスペースが
なくなりました。論理レベル反転は、ファームウエア
で実現します。
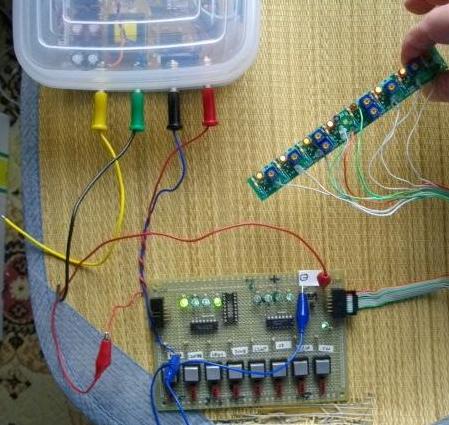
2つのセンサーは、スイッチ/LEDボードに接続して
感度調整をしました。
ワイドタイプセンサーの調整風景です。
幅を狭くしたので、インバータを載せるスペースが
なくなりました。論理レベル反転は、ファームウエア
で実現します。
2つのセンサーは、スイッチ/LEDボードに接続して
感度調整をしました。
ワイドタイプセンサーの調整風景です。
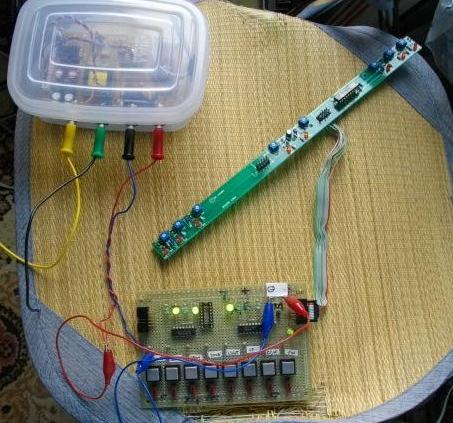 ナロータイプセンサーの調整風景です。
ナロータイプセンサーの調整風景です。
 ナロータイプセンサーでは、LEDをシャーシ側でなく
進行方向に向けないと、左右反転になります。
H8/3048を利用する場合は、ポート7にコネクタを
接続します。
ピン配置は、次のようにしました。
ナロータイプセンサーでは、LEDをシャーシ側でなく
進行方向に向けないと、左右反転になります。
H8/3048を利用する場合は、ポート7にコネクタを
接続します。
ピン配置は、次のようにしました。
 スタートゲートの開閉は、他のポートで検出します。
スタートゲートの開閉は、他のポートで検出します。
目次
前
次
