ポリテックビジョン(20110219)
小樽市銭函にある、能開大(ポリテックカレッジ)で毎年 開催されているポリテックビジョンの外部審査員をしてきました。 一部の内容をアップします。
ドン菓子製造機の設計・製作米を、シリンダーの中に入れて、加熱加圧してから 一気に減圧すると、ドン菓子ができあがります。 大きいシリンダーの蓋を開けるための取っ手を工夫し より少ない力で開閉できるようにしてあります。 また、加圧した場合に蓋にかかる圧力を、うまく分散する 形状を作ってあります。
仕分け・検査装置の製作3台の電動スライダーを利用して、試料を色、材質で 判定して、仕分けします。 近接センサー、金属センサーを利用し、材質による仕分け ができます。また、色センサーを利用し、色での仕分けが 可能です。 電動スライダー、マテハンの制御は、PLC(Programmable Logic Sequencer) を利用しています。生産設備としては、ごく一般的な構成です。
仕分けした試料は、棚に見立てたマガジンに置きます。 このマガジンの棚の段差により、不良品と製品を仕分けしています。
PLCは、三菱電機とキーエンスの小型のモノを利用しています。
道路用視線誘導標の改良と屋外評価 誘導標のための2次電池です。この2次電池にチャージするため、太陽電池パネルを利用します。 誘導標の上には、電波時計用のハードウエアがあります。 この電波時計で、時間を確認し、誘導標内部のLEDを発光 させます。
局面レンズを利用し、集光してドライバーの視線に光が 入るようにします。 写真では、面全体に広がっていますが、実際には細い帯に なっています。デジカメのCCDでは、このように見えますが 肉眼では、細い帯に見えます。 試作品なので、高さ調整や量産に向けての検討は、これから となっています。
鉄筋コンクリート部材のダボ挙動実験装置の設計・開発机上にある測定器で、ダボの位置、応力などを測定しています。
全方位移動型台車による倒立振子の制御 H8/3052を利用し、倒立する棒の偏移角をA/Dコンバータで 入力しています。シャーシを移動する方向と距離を計算後、オムニの車輪を 動かし、棒が垂直になるように制御します。 移動をスムーズにするためのギアを新しくしています。
ギアのモジュールが多くなっているので、回転がスムーズ になり、同時に発生トルクが大きくなります。
室内型無線飛行船「HOPS (Hokkaido Polytec Skyship)」の開発 展示会場である体育館の中を、マンボウのように移動する 飛行船ですが、iPadからの信号で制御されてます。大きさの比較のために、学生が係留のために曳航する 写真を撮りました。
方向を変えて、説明に聞き入る聴衆と比較するとサイズが わかると思います。 この飛行船に入れられた気体は、ヘリウムガス。 1回充填するのに約2万円だそう。(@_@) 4時間程度でしぼむそうです。(T_T)
操舵用電子回路とワイヤレス機器は、すべてこの容器の 中に入っています。
操舵用電子回路の制御は、北海道が誇る有名LinuxBoxのArmadillo。
魚型ロボットの開発3 ラジコンで動かすため、プロポを作成し ラジコンカーを制御して確認したそう。3代目のマシンですが、水面から1m程度で浮力とバランス して移動するとか。

評価用ダイオード素子の電流電圧特性測定装置の開発 シリコンサブストレートに形成したダイオードの上に 探針を移動して、H8/3052内蔵A/Dコンバータで、電流 と電圧を測定します。USBカメラを利用して、シリコンダイオードの形成状況と カソード、アノードを確認できます。
WindowsXP上で、VBによるアプリケーション開発だそう。 シリアルインタファースで、H8/3052から情報を入力し 画面に数値で表示しています。 数値の統計処理をして、グラフ表示にする部分があれば より使えるシステムになると思います。
リハビリ用支援システムの開発 リハビリのために、エアーホッケーを利用します。電動スライダーで、ゴールを死守します。 電動スライダーの移動速度を、利用者のレベルに あわせて、調整できるようになっています。
高齢者がゲームセンターに行く時代なので、孫の世代と 高齢者がゲームで対決するような環境を整備すると、 孤独死を防げるかも知れません。
遠隔操作による作業ロボットの開発 カメラを利用して、コンピュータの画面から 除雪機に指令を出します。 車体重量は、140kgだとか。 除雪には、重すぎるような気も。カメラは、スカフェの中にいれたドーム式です。 左右に、白色LEDを利用した照明があります。
制御は、DOS/Vマシンのマザーボードをそのまま 利用しています。
GPSと連携すると、自動で除雪ができるかも知れません。
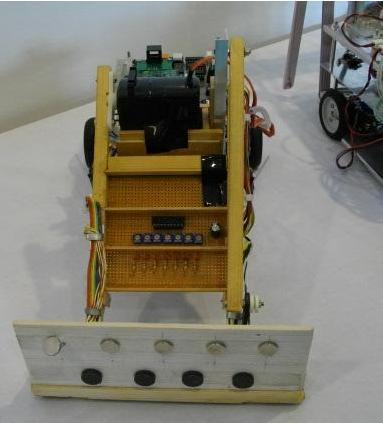
車輪走行型ロボットの開発 『ロボット・トライアスロン』のために作ったマシンです。ロボット・トライアスロンは、次の3種の競技を連続して実施します。
北海道内の大学生を対象としたオリジナル・ルールのロボット コンテストが、ロボット・トライアスロンです。 ライントレースのセンターラインとロボット。 カメラの制御と画像処理には、FPGAを利用しています。
- ライントレース
- 風船割り
- 迷路
前年度のプロトタイプだそう。
TAMIYAのショベルドーザをヒントにした、プロトタイプ。
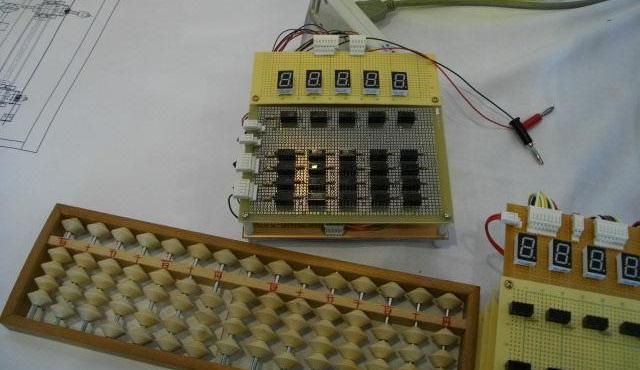
電子ソロバンの開発 インド式計算方法がブームになりましたが、日本では やはりソロバンが計算器の主流でしょう。 (電卓のように電源がいらないことも魅力です。)五玉、一玉の組合せで、0~9までを表現します。 デジタル計算の2進数とは異なりますが、計算は デジタルです。その概念を掴むには、よいでしょう。
「建築再生」プロジェクトへの実践的取り組み 廃線になった駅舎を、模型で再生しています。写真から駅舎の寸法を割り出し、CADで模型のための 図面を作り上げています。 Illustlatorにより、色の組み合わせを再現して 模型の色塗りをしています。 東川小学校の校舎を、模型再生しています。
校舎の周囲に置かれているオブジェクト(木、自動車等)は 市販品を利用しています。これらを使い、ジオラマでの再現 が可能になっています。 小樽の旧石山中学校の円形校舎もジオラマで残して 欲しいものです。珍しい円形校舎が、悲しいことに 企業の倉庫になっています。
(番外編)小学生の工作教室で作ったWindCarです。 風を受けると、ヨットのように、風に向かい移動します。輪ゴム、プーリーを使っていますが、シャーシはレーザー カッターをつかい、軸受けの中に小型のベアリングが入って います。 エネルギーの伝達ロスが少なくなるようになっています。

もどる