ポリテックビジョン(20120218)
小樽市銭函にある、職業能力開発大校(ポリテックカレッジ) で開催された、ポリテックビジョンの展示を見学してきました。 能開大では、4年間を2年間ずつに区切ってのカリキュラムに しています。大学1、2年生は、専門課程と呼び、3、4年生 は、応用課程としてカリキュラムが組まれています。 すべてを紹介できませんが、専門課程、応用課程の順に、展示 内容をアップしていきます。
チタンを使った自動車フレーム製作専門課程の学生が製作した、自動車フレームです。 チタンを利用していますが、チタンは軽量素材でイトカワまで 飛行し、サンプルリターンミッションを果たしたHAYABUSAでも 使われました。 軽量素材ではあるのですが、非常に固く、加工しにくいのが特徴 です。旋盤加工しようとすると、固いためにバイトが、すぐに お釈迦になったり、摩擦熱で発火します。
フレーム加工後、自動車に必要なパーツを取り付け、乗れる 状態にしてありました。 学生の体格(160cm~180cm)と比較するとわかりますが 「ママチャリ」より小さいサイズに仕上がっています。
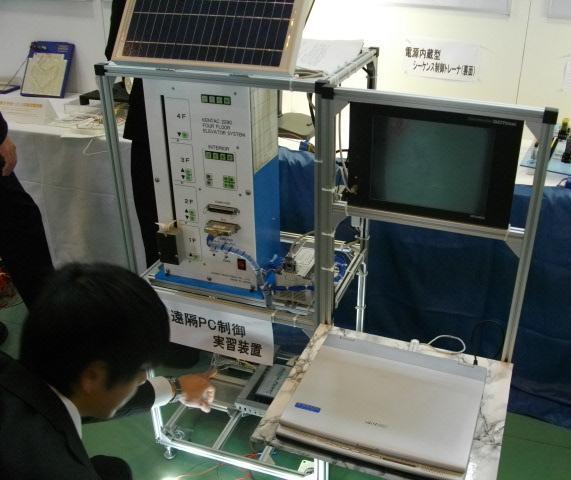
タッチパネルによる遠隔PC制御実習装置の製作専門課程の学生が製作した、PC制御実習装置です。 ここでPCと呼ぶのは、Programmable Controllerです。 Personal Computerではありません。
PCで使う直流電源は+24Vが主流で、一般家電品で利用する +12Vとはかけ離れています。そこで、+12Vから+24Vを生成 するDCDCコンバータをリレー実装面の下に配置しています。 +12Vは、アルカリ電池8本で済ませているので、家電品を 使える環境に、実験装置を運んで実習できます。 この実習装置とタッチパネルを接続し、エレベータケージの 移動制御実習ができます。
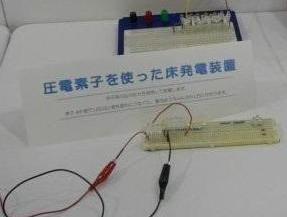
小容量環境発電と実用性の模索 専門課程の学生が製作した、小さな発電装置の数々です。「よさこいソーラン」祭で使う鳴子に、発電装置を 組込み、動かすことで発電し、LEDを点灯させます。 発電は、手回し発電機と同じ原理を使っています。
手軽に利用できる発電装置には、圧力センサーがあります。 床下に敷き詰めた圧電素子から、圧をかけることで発生する 起電力を集めて、LEDを点灯します。
小型LEDの点灯装置は、廊下床面に設ける案内灯に 利用できます。
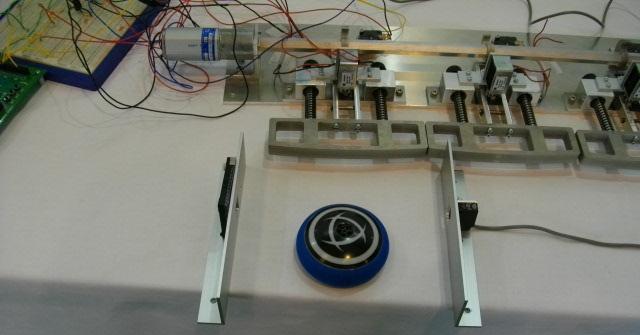
全方位移動型台車による倒立振子の制御 応用課程の学生が製作した、ボールネジを利用の 1軸方向倒立振子装置です。シーケンサ(PC)で、ボールネジに取り付けたベッドの、 移動を制御しています。
センシング、制御信号を与えるために、マイコンを利用します。 また、DCDCコンバータを利用し、シーケンサの電源電圧+24Vを 作っています。

機械工学実験支援システムの開発 応用課程の学生が製作した、卓上引張圧縮試験機です。試験試料に対して、引張、圧縮の荷重をかけて 変形を測定できます。
シーケンサを利用し、ボールネジにつけたベッドを上下し 引張、圧縮の荷重を生成しています。
遠隔操作型除雪作業用ロボット「YUKIATSU」の開発 応用課程の学生が製作した、除雪作業装置です。次の機械上の特徴をもっています。
クローラで車体が埋まりにくい バケットを3つの電動シリンダで制御 バケットに雪を入れてもスムーズに動くよう重心を後方におく 遠隔操作用が楽になるよう、除雪装置内部に組込みLinuxボード を入れています。このLinuxボードにより、無線LANでの指令発動 が簡単になっています。
空撮用クワッドコプタの開発 応用課程の学生が製作した、飛翔体です。長方形の四隅へのローター配置で、重心が中央になるようにしています。 墜落を考えた緩衝材がないのが、気になります。
フレームはカーボンパイプ材を使っています。 機体に、航空ベニアを利用したモックアップも 展示されていました。
真円度測定システムの開発 応用課程の学生が製作した、板の真円度測定装置です。 フライホイールやブレーキディスクに利用する円盤の真円度 を測定します。円盤の真円度が低いと、円盤を回転させたとき、軸やシャフトに アンバランスな遠心力がかかり、軸やシャフトの特定部位だけに 力が集中します。そのよう好ましくない力を、可能な限り、排除 する場面で使います。
アームを左右に振り、探針による円周位置を測定していきます。 Personal Computerの画面に円周を描き、同時に測定データを ファイルとして保存するシステムになっています。
凹凸形状試料用四探針プローブとそれを用いた抵抗率測定装置の開発 応用課程の学生が製作した、四探針プローブです。四探針プローブを、試料にあて、凹凸を測定するとともに 抵抗率を測定します。 四探針プローブを試料にあてるためのハードウエアは、XY方向に移動 できるベッドを持ったフライス盤と同じ機構を使っていました。
超音波による屋内ナビゲーションシステムの開発 応用課程の学生が製作した、ナビゲーションシステムです。屋内の各所にIDをつけた超音波センサーを配置しておきます。 屋内を移動するユーザーには、端末を持たせ、端末から 超音波センサーに信号を送信します。その信号を捕捉した 装置は、サーバにユーザー位置をID情報で送信します。 サーバーは、端末にユーザーのいる場所を情報として送信します。
ユーザーがもつ端末です。LCD画面にマップを表示して 位置を知らせます。
リハビリ支援システムの開発2 応用課程の学生が製作した、エアホッケー装置によるリハビリ 支援システムです。 銀色のLアングルの間を、パックが横切ると、モータを回転 させ、ハンマーを位相差をもって前後に動かします。 位相差をカムで作ってあります。 この方式では、モータを1個にできるので制御が 必定に簡単になります。制御が単純なので、1チップマイコンでモータの回転 パック検出を同時にやっています。
パックは、ホバークラフトと同じ原理で、エアーを下に 吹き付けて浮上させています。パックが横切ったことを 近接センサーで判定しています。
ビジョンセンサによる制御システムの開発3 応用課程の学生が製作した、トライアスロンロボットです。 カメラを利用しライントレースし、缶をサーボモータで 掴む機構を持っています。ラインは、黒テープで作ったレールです。 実際のコースは、緑の地に黒テープです。

オセロ対局ロボットの開発 応用課程の学生が製作した、対局タイプのオセロ装置です。 XY方向をそれぞれ1軸のモータで構成し、タイミングベルトを 使い、オセロ盤の上にバキュームシリンダーと角柱を移動させ ます。バキュームシリンダーでオセロの駒を吸い上げ、白と黒の 入れ替えは、角柱に駒を入れて実現します。 角柱内部に傾斜を用意し、裏と表が反転するメカを備えて います。重力をうまく利用しています。 反転したか否かは、カラーセンサーで判定しています。 制御は単純ですが、配線がスパゲッティ状態。
競技会用車輪走行型ロボットの開発2 応用課程の学生が製作した、車輪走行型ロボットです。 ロボットトライアスロン用に設計、開発されたロボットです。 前面にあるハンドで缶を掴み、指定位置に置くことができます。 ライントレース用に、密着タイプ路面センサーを持ちます。同じ設計思想をもつ、別のメカを持つロボットもあります。 左にボールをすくい上げるアームを持っています。 アームは平行クランクで、自動車のワイパーと同じ機構です。 パンタグラフの上下動を、モータの1回転で実現してます。
アームですくい上げるボールは、ダイソーなどで入手できる 発泡スチロール素材を使います。

強盗犯捕獲システムの開発 応用課程の学生が製作した、ペイント射出装置です。 顔を登録済のフロア在住者と未登録の人間の識別をして おいて、必要と判断したときに、未登録の人間に対して ペイントを射出します。顔の登録済、未登録の判断は、Personal Computer上の アプリケーションソフトで行い、マイコンでペイント 射出と射出方向の制御をしています。

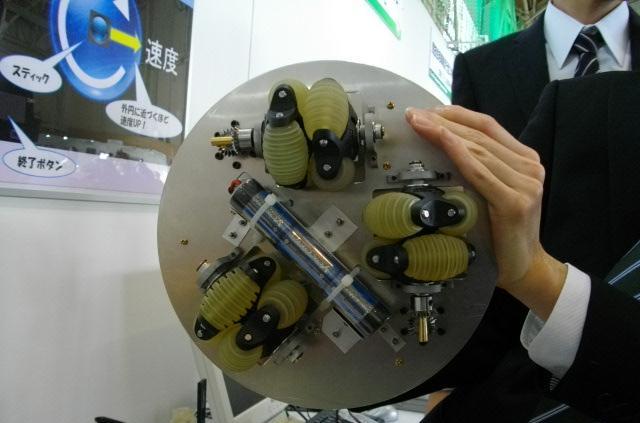
水難救助用ロボットの開発 応用課程の学生が製作した、水面移動浮き輪です。 Sphereを2つ重ね、球体を作ります。球体の中に 地磁センサを持っているので、指定された方向に 回転しながら移動します。 海や川で水難に遭遇した人に、この移動浮き輪を 投げて、救助者の2次遭難を防ぎます。オムニホィールを利用して、一定の方向に移動します。 球体の下にオムニホィールとバッテリーを配置するので 安定させています。
ロボット運動会 競技会用車輪走行型ロボットのメカとファームウエアを 改造し、無線制御のロボットを使った競技会をやって いました。対照は、小学生、中学生です。 運動会は、タイムトラアルになっていました。 ロボットの概要を大雑把にみてみます。 移動には、TAMIYAのTWIN GEAR BOXを利用しています。 ボールをすくい上げるためのモータは、ウオームギアを 使っているようです。 無線操作に、ZigBeeの送受信機を使っています。コースは、左右のゲートからスタートし、黄テープに 沿って進みます。
平均台を超えたなら、ゲートに向けて進みます。
ゲートが閉じているので、LEDを使って合図を送り 開けてもらいます。
そのままゴールしてもよいですし、ボールを拾って ダストエリアに入れてからのゴールでもOK。 ボールをダストエリアに入れるとタイムを10秒 短くできます。
昔懐かしいファミコンのコントローラでロボットを 操ります。ドンキホーテで手に入ります。
昔ファミコンを触っていたオジサンも参加していたのね。

もどる