カラーセンサー情報取得3
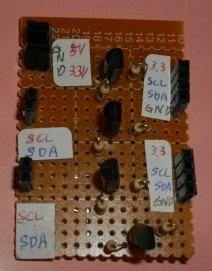
浜松ホトニクスのI2Cバスインタフェースカラーセンサーを 2個、Arduinoに接続してみます。基板に回路を半田付けすると、次のようになります。
デジタルインタフェースがあるので、その2ビットを利用して 動作させることも可能ですが、AVRチップ内蔵ハードウエアを 利用して信頼度を確保します。 アナログスイッチを利用して、2個のカラーセンサーとの 接続を切り替えます。しかし、この方法では、うまく動作 しませんでした。 カラーセンサーは3.3Vで動作するため、プルアップしても Arduinoが5V動作が前提であるため、電圧のレベル変換が 必要でした。 秋月電子で販売されている双方向電圧レベル変換モジュール を利用して、対応しました。
このモジュールを利用して動作確認するために 作成したスケッチは、以下。 #include <MsTimer2.h> #include <EEPROM.h> #define OFF 0 #define ON OFF+1 #define MSCL_BIT 3 #define MSDA_BIT 2 #define MASK80 0x80 #define IIC_CNT 32 #define LED_BIT 5 #define DEVICE_ID 0x2A #define CONTROL_REG 0x00 #define NPER 800 #define SCODE_ADR 0x100 #define SHOW_ADR 0x101 /* event flag */ boolean eflag ; boolean tflag ; boolean uflag ; /* state flag */ boolean gflag ; /* select only green information */ boolean mflag ; /* mask flag */ /* timing counter */ byte xcnt ; /* serial interface */ byte cmd ; byte sindex ; char sbuf[4] ; /* RGB and IR */ word xrgbi[4] ; /* sensor command */ byte scmd ; /* LED flashing */ void send_led(byte x) { if ( x ) { PORTB |= (1 << LED_BIT) ; } else { PORTB &= ~(1 << LED_BIT) ; } } /* generate trigger */ void update_trigger(void) { /* LED flashing */ send_led( xcnt & ON ); /* trigger */ xcnt++ ; if ( xcnt & ON ) { tflag = ON ; } } /* putchar on serial interface */ void rs_putchar(char x) { Serial.write(x); } /* puts on serial interface */ void rs_puts(char *x) { while ( *x ) { rs_putchar( *x ); x++ ; } } /* new line */ void crlf() { rs_putchar('\r'); rs_putchar('\n'); } void show_help() { rs_puts("? help") ; crlf(); rs_puts("E execute") ; crlf(); rs_puts("I idle") ; crlf(); rs_puts("C one shot") ; crlf(); rs_puts("S set sensibility 1:high 0:low") ; crlf(); rs_puts("L set exposure time Length(0/1/2/3)") ; crlf(); rs_puts("G set only Green information 1:YES 0:NO") ; crlf(); rs_puts("M set mask 1:YES 0:NO") ; crlf(); rs_puts("s show staus") ; crlf(); } void show_value(word x) { word tmp ; char msg[6] ; byte i ; /* copy */ tmp = x; /* delimiter */ *(msg+5) = '\0' ; /* separate */ for ( i = 0 ; i < 5 ; i++ ) { /* value -> digit number */ *(msg+4-i) = (tmp % 10)+ '0' ; /* next */ tmp /= 10 ; } /* zero surppress */ if ( x < 10000 ) { *(msg+0) = ' ' ; if ( x < 1000 ) { *(msg+1) = ' ' ; if ( x < 100 ) { *(msg+2) = ' ' ; if ( x < 10 ) { *(msg+3) = ' ' ; } } } } /* show */ rs_puts( msg ) ; rs_putchar(' '); } void m_iic_wait(void) { byte i ; /* wait */ for ( i = 0 ; i < IIC_CNT ; i++ ) ; } void m_iic_scl(byte x) { /* impress */ if ( x ) { PORTC |= (1 << MSCL_BIT) ; } else { PORTC &= ~(1 << MSCL_BIT) ; } /* delay */ m_iic_wait(); } void m_iic_start(void) { /* both H */ PORTC |= (3 << MSDA_BIT) ; /* delay */ m_iic_wait(); /* 0 -> SDA */ PORTC &= ~(1 << MSDA_BIT) ; /* delay */ m_iic_wait(); /* 0 -> SCL */ PORTC &= ~(1 << MSCL_BIT) ; } void m_iic_stop(void) { /* set level */ PORTC |= (1 << MSCL_BIT) ; PORTC &= ~(1 << MSDA_BIT) ; /* delay */ m_iic_wait(); /* 1 -> SDA */ PORTC |= (1 << MSDA_BIT) ; /* delay */ m_iic_wait(); } byte m_iic_write(byte x) { byte i ; byte tmp ; /* load raw data */ tmp = x ; /* transfer data with write code */ for ( i = 0 ; i < 8 ; i++ ) { /* send bit datum */ PORTC &= ~(1 << MSDA_BIT) ; if ( tmp & MASK80 ) { PORTC |= (1 << MSDA_BIT) ; } /* 1 -> SCL */ m_iic_scl(ON); /* shift */ tmp <<= 1 ; /* 0 -> SCL */ m_iic_scl(OFF); } PORTC &= ~(1 << MSDA_BIT) ; /* change inupt */ DDRC &= ~(1 << MSDA_BIT) ; /* 1 -> SCL */ m_iic_scl(ON); /* get acknowledge */ tmp = (PINC & (1 << MSDA_BIT)) >> 2 ; /* 0 -> SCL */ m_iic_scl(OFF); /* change output */ DDRC |= (1 << MSDA_BIT) ; return tmp ; } byte m_iic_read(byte x) { byte i; byte result ; /* change inupt */ PORTC &= ~(1 << MSDA_BIT) ; DDRC &= ~(1 << MSDA_BIT) ; /* default */ result = 0 ; for ( i = 0 ; i < 8 ; i++ ) { /* shift */ result <<= 1 ; /* 1 -> SCL */ m_iic_scl(ON); /* get bit datum */ if ( PINC & (1 << MSDA_BIT) ) { result |= ON ; } /* 0 -> SCL */ m_iic_scl(OFF); } /* change output */ DDRC |= (1 << MSDA_BIT) ; if ( x ) { PORTC |= (1 << MSDA_BIT); } else { PORTC &= ~(1 << MSDA_BIT); } /* 1 -> SCL */ m_iic_scl(ON); /* 0 -> SCL */ m_iic_scl(OFF); return result ; } void get_color() { byte i ; byte j ; word tmp ; byte xx[8] ; /* preset gain mode exposure time (each color ch) 00 = 87.5us => 0.9ms 01 = 1.4ms => 2.0ms 10 = 22.4ms => 23ms 11 = 179.2ms => 180ms */ i = scmd & 3 ; if ( i == 3 ) { tmp = 180 * 4; } if ( i == 2 ) { tmp = 23 * 4; } if ( i < 2 ) { tmp = 2 * 4; } /* */ j = DEVICE_ID ; j <<= 1 ; j &= 0xFE ; /* initialize */ m_iic_start(); m_iic_write(j); m_iic_write(CONTROL_REG); m_iic_write(0x83); m_iic_start(); m_iic_write(j); m_iic_write(CONTROL_REG); /* set High or Low and exposure length */ m_iic_write(0x03); m_iic_stop(); /* wait */ delay( tmp ) ; /* read */ m_iic_start(); m_iic_write(j); m_iic_write(0x03); m_iic_start(); m_iic_write(j | ON); /* get */ j = 0 ; for ( i = 0 ; i < 8 ; i++ ) { if ( i == 7 ) { j = 1 ; } *(xx+i) = m_iic_read(j); } /* stop */ m_iic_stop(); /* store */ for ( i = 0 ; i < 4 ; i++ ) { j = (i << 1); tmp = *(xx+j) ; tmp <<= 8 ; tmp |= *(xx+j+1) ; *(xrgbi+i) = tmp ; } } void show_yn() { char msg[2]; /* delimiter */ *(msg+1) = '\0' ; /* sensibility */ { *(msg+0) = 'L' ; if ( scmd & 8 ) { *(msg+0) = 'H' ; } rs_puts( msg ); } /* exposure length */ { rs_putchar( '0'+(scmd & 3) ); } /* Green */ { *(msg+0) = 'N' ; if ( gflag == ON ) { *(msg+0) = 'Y' ; } rs_puts( msg ); } /* Mask */ { *(msg+0) = 'N' ; if ( mflag == ON ) { *(msg+0) = 'Y' ; } rs_puts( msg ); } /* new line */ crlf(); } void store_param(byte which,byte x) { word madr ; /* sensibility or exposure length */ if ( which < 2 ) { madr = SCODE_ADR ; } /* Green information */ if ( which == 2 ) { madr = SHOW_ADR ; } /* store */ EEPROM.write(madr,x); } void show_color(boolean x) { /* only Green information */ if ( x ) { rs_puts("G :") ; show_value( *(xrgbi+1) ); } else /* all color informations */ { rs_puts("R :") ; show_value( *(xrgbi+0) ); rs_puts("G :") ; show_value( *(xrgbi+1) ); rs_puts("B :") ; show_value( *(xrgbi+2) ); rs_puts("IR:") ; show_value( *(xrgbi+3) ); } crlf(); } void setup() { /* initialize serial port */ Serial.begin(9600); sindex = 0 ; /* set initial state */ PORTB = 0x00 ; PORTC = 0x0C ; PORTD = 0x01 ; /* direction */ DDRB = 0xff ; DDRC = 0xff ; DDRD = 0xfe ; /* clear flags */ tflag = OFF ; eflag = OFF ; uflag = OFF ; gflag = OFF ; /* resume previous state */ xcnt = EEPROM.read(SCODE_ADR); if ( xcnt == 0xff ) { scmd = 11 ; EEPROM.write(SCODE_ADR,scmd); } else { scmd = xcnt ; } xcnt = EEPROM.read(SHOW_ADR); if ( xcnt != OFF ) { gflag = ON ; } /* initialize variables */ xcnt = 0 ; for ( xcnt = 0 ; xcnt < 4 ; xcnt++ ) { *(xrgbi+xcnt) = 0 ; } /* trigger period */ MsTimer2::set(NPER,update_trigger); /* enable */ MsTimer2::start(); } void loop() { /* serial handling */ if ( uflag == ON ) { /* clear flag */ uflag = OFF ; /* new line */ crlf(); /* get command */ cmd = *(sbuf+0) ; /* help */ if ( cmd == '?' ) { show_help() ; } /* enable */ if ( cmd == 'E' ) { eflag = ON ; } /* disable */ if ( cmd == 'I' ) { eflag = OFF ; } /* one shot */ if ( cmd == 'C' ) { /* get color values */ get_color(); /* show */ show_color(gflag); } /* write sensibility state */ if ( cmd == 'S' ) { /* set default (selct LOW) */ scmd &= 0xf7 ; /* set flag (HIGH or LOW) */ if ( *(sbuf+1) == '1' ) { scmd |= (1 << 3) ; } /* store EEPROM */ store_param(0,scmd); } /* write exposure length */ if ( cmd == 'L' ) { /* clear */ scmd &= 0xfc ; /* generate code */ scmd |= ((*(sbuf+1) - '0') & 3); /* store EEPROM */ store_param(1,scmd); } /* write only Green information */ if ( cmd == 'G' ) { /* default */ gflag = OFF ; /* judge */ if ( *(sbuf+1) == '1' ) { gflag = ON ; } /* store */ store_param(2,gflag); } /* write mask */ if ( cmd == 'M' ) { /* default */ mflag = OFF ; /* judge */ if ( *(sbuf+1) == '1' ) { mflag = ON ; } } /* show status */ if ( cmd == 's' ) { show_yn(); } } /* timer handling */ if ( tflag == ON ) { /* clear flag */ tflag = OFF ; /* get color values */ get_color(); /* show */ if ( eflag == ON ) { show_color(gflag) ; } } } /* receive interrupt */ void serialEvent() { char ch; if ( Serial.available() > 0 ) { /* get 1 character */ ch = Serial.read(); /* store */ *(sbuf+sindex) = ch ; /* increment */ sindex++ ; /* judge */ if ( ch == '\r' ) { sindex = 0 ; uflag = ON ; } } } Arduinoでは、A5、A4にSCL、SDAがアサインされています。 汎用I/OでIICバスの処理を実現するため、専用関数を5種 ほど用意して対応しました。 IICのインタフェースは、次の項目を実現する関数の定義を 考えました。
- start condtion
- stop condtion
- write 1byte without acknowledge
- write 1byte with acknowledge
- read 1byte without acknowledge
- read 1byte with acknowledge
 タイミングチャートからわかることを見ていきます。
8ビットをリードする場合、IICバスマスターから
acknowledgeを与えますが、1か0かを指定する時
があります。
8ビットをライトする場合、IICバススレーブから
必ずacknowledgeの0を確認しています。
ArduinoのポートCのA5、A4は、ライブラリで処理する
として、A3、A2にSCL、SDAを割り当てて、必要な関数
を定義します。
5種類の関数を定義していきます。
start condtion
start condtionは、次のタイミングチャートに従い
SCLが'H'のときに、SDAを'H'から'L'に変化させます。
タイミングチャートからわかることを見ていきます。
8ビットをリードする場合、IICバスマスターから
acknowledgeを与えますが、1か0かを指定する時
があります。
8ビットをライトする場合、IICバススレーブから
必ずacknowledgeの0を確認しています。
ArduinoのポートCのA5、A4は、ライブラリで処理する
として、A3、A2にSCL、SDAを割り当てて、必要な関数
を定義します。
5種類の関数を定義していきます。
start condtion
start condtionは、次のタイミングチャートに従い
SCLが'H'のときに、SDAを'H'から'L'に変化させます。
 SCL、SDAをともに'H'にした後、SDAを'L'にします。
さらにSCLを'L'にして終了です。
void m_iic_start(void)
{
/* both H */
PORTC |= (3 << MSDA_BIT) ;
/* delay */
m_iic_wait();
/* 0 -> SDA */
PORTC &= ~(1 << MSDA_BIT) ;
/* delay */
m_iic_wait();
/* 0 -> SCL */
PORTC &= ~(1 << MSCL_BIT) ;
}
IICバス用ディレイ
SCL、SDAを変化させたときには、少しの間
待ち時間を入れた方が、動作が安定します。
ディレイを定義します。
#define IIC_CNT 32
void m_iic_wait(void)
{
byte i ;
/* wait */
for ( i = 0 ; i < IIC_CNT ; i++ ) ;
}
stop condtion
stop condtionは、次のタイミングチャートに従い
SCLが'H'のときに、SDAを'L'から'H'に変化させます。
SCL、SDAをともに'H'にした後、SDAを'L'にします。
さらにSCLを'L'にして終了です。
void m_iic_start(void)
{
/* both H */
PORTC |= (3 << MSDA_BIT) ;
/* delay */
m_iic_wait();
/* 0 -> SDA */
PORTC &= ~(1 << MSDA_BIT) ;
/* delay */
m_iic_wait();
/* 0 -> SCL */
PORTC &= ~(1 << MSCL_BIT) ;
}
IICバス用ディレイ
SCL、SDAを変化させたときには、少しの間
待ち時間を入れた方が、動作が安定します。
ディレイを定義します。
#define IIC_CNT 32
void m_iic_wait(void)
{
byte i ;
/* wait */
for ( i = 0 ; i < IIC_CNT ; i++ ) ;
}
stop condtion
stop condtionは、次のタイミングチャートに従い
SCLが'H'のときに、SDAを'L'から'H'に変化させます。
 SCL、SDAをともに'L'にした後、SDAを'H'にします。
さらにSCLを'H'にして終了です。
void m_iic_stop(void)
{
/* set level */
PORTC |= (1 << MSCL_BIT) ;
PORTC &= ~(1 << MSDA_BIT) ;
/* delay */
m_iic_wait();
/* 1 -> SDA */
PORTC |= (1 << MSDA_BIT) ;
/* delay */
m_iic_wait();
}
write 1byte with acknowledge
タイミングチャートを確認します。
SCL、SDAをともに'L'にした後、SDAを'H'にします。
さらにSCLを'H'にして終了です。
void m_iic_stop(void)
{
/* set level */
PORTC |= (1 << MSCL_BIT) ;
PORTC &= ~(1 << MSDA_BIT) ;
/* delay */
m_iic_wait();
/* 1 -> SDA */
PORTC |= (1 << MSDA_BIT) ;
/* delay */
m_iic_wait();
}
write 1byte with acknowledge
タイミングチャートを確認します。
 SCL、SDAを利用して、8ビット分のデータを転送後
スレーブの出力する'L'を確認します。
byte m_iic_write(byte x)
{
byte i ;
byte tmp ;
/* load raw data */
tmp = x ;
/* transfer data with write code */
for ( i = 0 ; i < 8 ; i++ ) {
/* send bit datum */
PORTC &= ~(1 << MSDA_BIT) ;
if ( tmp & MASK80 ) { PORTC |= (1 << MSDA_BIT) ; }
/* 1 -> SCL */
m_iic_scl(ON);
/* shift */
tmp <<= 1 ;
/* 0 -> SCL */
m_iic_scl(OFF);
}
PORTC &= ~(1 << MSDA_BIT) ;
/* change inupt */
DDRC &= ~(1 << MSDA_BIT) ;
/* 1 -> SCL */
m_iic_scl(ON);
/* get acknowledge */
tmp = (PINC & (1 << MSDA_BIT)) >> 2 ;
/* 0 -> SCL */
m_iic_scl(OFF);
/* change output */
DDRC |= (1 << MSDA_BIT) ;
return tmp ;
}
SCLレベル指定と遅延
SCLは、H、Lを頻繁に変えるときがあり、さらに
パルス幅も必要なので、論理レベルを指定する
関数を定義しておきます。
void m_iic_scl(byte x)
{
/* impress */
if ( x ) { PORTC |= (1 << MSCL_BIT) ; }
else { PORTC &= ~(1 << MSCL_BIT) ; }
/* delay */
m_iic_wait();
}
read 1byte with acknowledge
SDAを入力に設定して、SCLでパルスを与え8ビット分のデータを
リードします。さらに、acknowledgeを与えます。
byte m_iic_read(byte x)
{
byte i;
byte result ;
/* change inupt */
PORTC &= ~(1 << MSDA_BIT) ;
DDRC &= ~(1 << MSDA_BIT) ;
/* default */
result = 0 ;
for ( i = 0 ; i < 8 ; i++ ) {
/* shift */
result <<= 1 ;
/* 1 -> SCL */
m_iic_scl(ON);
/* get bit datum */
if ( PINC & (1 << MSDA_BIT) ) { result |= ON ; }
/* 0 -> SCL */
m_iic_scl(OFF);
}
/* change output */
DDRC |= (1 << MSDA_BIT) ;
if ( x ) { PORTC |= (1 << MSDA_BIT); }
else { PORTC &= ~(1 << MSDA_BIT); }
/* 1 -> SCL */
m_iic_scl(ON);
/* 0 -> SCL */
m_iic_scl(OFF);
return result ;
}
初期状態設定
IICバスをまったく利用しない場合は、SCL、SDAは
ともに'H'になります。これをsetup()の中で設定
します。
PORTC = 0x0C ;
利用する関数を定義できたので、処理シーケンスを
考えます。
データシートでは、次のように処理シーケンスを規定。
SCL、SDAを利用して、8ビット分のデータを転送後
スレーブの出力する'L'を確認します。
byte m_iic_write(byte x)
{
byte i ;
byte tmp ;
/* load raw data */
tmp = x ;
/* transfer data with write code */
for ( i = 0 ; i < 8 ; i++ ) {
/* send bit datum */
PORTC &= ~(1 << MSDA_BIT) ;
if ( tmp & MASK80 ) { PORTC |= (1 << MSDA_BIT) ; }
/* 1 -> SCL */
m_iic_scl(ON);
/* shift */
tmp <<= 1 ;
/* 0 -> SCL */
m_iic_scl(OFF);
}
PORTC &= ~(1 << MSDA_BIT) ;
/* change inupt */
DDRC &= ~(1 << MSDA_BIT) ;
/* 1 -> SCL */
m_iic_scl(ON);
/* get acknowledge */
tmp = (PINC & (1 << MSDA_BIT)) >> 2 ;
/* 0 -> SCL */
m_iic_scl(OFF);
/* change output */
DDRC |= (1 << MSDA_BIT) ;
return tmp ;
}
SCLレベル指定と遅延
SCLは、H、Lを頻繁に変えるときがあり、さらに
パルス幅も必要なので、論理レベルを指定する
関数を定義しておきます。
void m_iic_scl(byte x)
{
/* impress */
if ( x ) { PORTC |= (1 << MSCL_BIT) ; }
else { PORTC &= ~(1 << MSCL_BIT) ; }
/* delay */
m_iic_wait();
}
read 1byte with acknowledge
SDAを入力に設定して、SCLでパルスを与え8ビット分のデータを
リードします。さらに、acknowledgeを与えます。
byte m_iic_read(byte x)
{
byte i;
byte result ;
/* change inupt */
PORTC &= ~(1 << MSDA_BIT) ;
DDRC &= ~(1 << MSDA_BIT) ;
/* default */
result = 0 ;
for ( i = 0 ; i < 8 ; i++ ) {
/* shift */
result <<= 1 ;
/* 1 -> SCL */
m_iic_scl(ON);
/* get bit datum */
if ( PINC & (1 << MSDA_BIT) ) { result |= ON ; }
/* 0 -> SCL */
m_iic_scl(OFF);
}
/* change output */
DDRC |= (1 << MSDA_BIT) ;
if ( x ) { PORTC |= (1 << MSDA_BIT); }
else { PORTC &= ~(1 << MSDA_BIT); }
/* 1 -> SCL */
m_iic_scl(ON);
/* 0 -> SCL */
m_iic_scl(OFF);
return result ;
}
初期状態設定
IICバスをまったく利用しない場合は、SCL、SDAは
ともに'H'になります。これをsetup()の中で設定
します。
PORTC = 0x0C ;
利用する関数を定義できたので、処理シーケンスを
考えます。
データシートでは、次のように処理シーケンスを規定。
 シーケンスを3処理に分割し、3処理を詳細に見て
Arduinoスケッチで使うコードを決めていきます。
initialize
初期化あるいはフォーマットと呼ばれる処理で
センター感度や変換に必要な時間を決めます。
start condition m_iic_start();
send ID(0x2A+'0') m_iic_write((0x2a << 1));
send 0x00 m_iic_write(0x00);
send 0x84 m_iic_write(0x84);
start condition m_iic_start();
send ID(0x2A+'0') m_iic_write((0x2a << 1));
send 0x00 m_iic_write(0x00);
send 0x04 m_iic_write(0x04);
stop condition m_iic_stop();
wait
センサーがR、G、Bおよび輝度の情報を取得するには
時間がかかります。Arduinoのライブラリを使った時
に使った計算式で、WAITの時間を決めます。
/*
preset gain mode exposure time (each color ch)
00 = 87.5us => 0.9ms
01 = 1.4ms => 2.0ms
10 = 22.4ms => 23ms
11 = 179.2ms => 180ms
*/
i = scmd & 3 ;
if ( i == 3 ) { tmp = 180 * 4; }
if ( i == 2 ) { tmp = 23 * 4; }
if ( i < 2 ) { tmp = 2 * 4; }
変数scmdでは、センサーの感度を決める場合に
指定するので、それに沿った値を計算して代入
します。
read
センサーからの情報取得なので、規定されている
シーケンスを見て、動作を記述します。
start condition m_iic_start();
send ID(0x2A+'0') m_iic_write((0x2a << 1));
send 0x03 m_iic_write(0x03);
start condition m_iic_start();
send ID(0x2A+'1') m_iic_write((0x2a << 1) | ON);
read upper data(red) rx = m_iic_read(0); rx <<= 8 ;
read lower data(red) rx |= m_iic_read(0);
read upper data(green) gx = m_iic_read(0); gx <<= 8 ;
read lower data(green) gx |= m_iic_read(0);
read upper data(blue) bx = m_iic_read(0); bx <<= 8 ;
read lower data(blue) bx |= m_iic_read(0);
read upper data(intensity) ix = m_iic_read(0); ix <<= 8 ;
read lower data(intensity) ix |= m_iic_read(1);
stop condition m_iic_stop();
シーケンスがわかったので、ひとつの関数にまとめます。
void get_color()
{
byte i ;
byte j ;
word tmp ;
byte xx[8] ;
/*
preset gain mode exposure time (each color ch)
00 = 87.5us => 0.9ms
01 = 1.4ms => 2.0ms
10 = 22.4ms => 23ms
11 = 179.2ms => 180ms
*/
i = scmd & 3 ;
if ( i == 3 ) { tmp = 180 * 4; }
if ( i == 2 ) { tmp = 23 * 4; }
if ( i < 2 ) { tmp = 2 * 4; }
/* */
j = DEVICE_ID ;
j <<= 1 ;
j &= 0xFE ;
/* initialize */
m_iic_start();
m_iic_write(j);
m_iic_write(CONTROL_REG);
m_iic_write(0x83);
m_iic_start();
m_iic_write(j);
m_iic_write(CONTROL_REG);
/* set High or Low and exposure length */
m_iic_write(0x03);
m_iic_stop();
/* wait */
delay( tmp ) ;
/* read */
m_iic_start();
m_iic_write(j);
m_iic_write(0x03);
m_iic_start();
m_iic_write(j | ON);
/* get */
j = 0 ;
for ( i = 0 ; i < 8 ; i++ ) {
if ( i == 7 ) { j = 1 ; }
*(xx+i) = m_iic_read(j);
}
/* stop */
m_iic_stop();
/* store */
for ( i = 0 ; i < 4 ; i++ ) {
j = (i << 1);
tmp = *(xx+j) ;
tmp <<= 8 ;
tmp |= *(xx+j+1) ;
*(xrgbi+i) = tmp ;
}
}
端末で動作を確認してみました。
シーケンスを3処理に分割し、3処理を詳細に見て
Arduinoスケッチで使うコードを決めていきます。
initialize
初期化あるいはフォーマットと呼ばれる処理で
センター感度や変換に必要な時間を決めます。
start condition m_iic_start();
send ID(0x2A+'0') m_iic_write((0x2a << 1));
send 0x00 m_iic_write(0x00);
send 0x84 m_iic_write(0x84);
start condition m_iic_start();
send ID(0x2A+'0') m_iic_write((0x2a << 1));
send 0x00 m_iic_write(0x00);
send 0x04 m_iic_write(0x04);
stop condition m_iic_stop();
wait
センサーがR、G、Bおよび輝度の情報を取得するには
時間がかかります。Arduinoのライブラリを使った時
に使った計算式で、WAITの時間を決めます。
/*
preset gain mode exposure time (each color ch)
00 = 87.5us => 0.9ms
01 = 1.4ms => 2.0ms
10 = 22.4ms => 23ms
11 = 179.2ms => 180ms
*/
i = scmd & 3 ;
if ( i == 3 ) { tmp = 180 * 4; }
if ( i == 2 ) { tmp = 23 * 4; }
if ( i < 2 ) { tmp = 2 * 4; }
変数scmdでは、センサーの感度を決める場合に
指定するので、それに沿った値を計算して代入
します。
read
センサーからの情報取得なので、規定されている
シーケンスを見て、動作を記述します。
start condition m_iic_start();
send ID(0x2A+'0') m_iic_write((0x2a << 1));
send 0x03 m_iic_write(0x03);
start condition m_iic_start();
send ID(0x2A+'1') m_iic_write((0x2a << 1) | ON);
read upper data(red) rx = m_iic_read(0); rx <<= 8 ;
read lower data(red) rx |= m_iic_read(0);
read upper data(green) gx = m_iic_read(0); gx <<= 8 ;
read lower data(green) gx |= m_iic_read(0);
read upper data(blue) bx = m_iic_read(0); bx <<= 8 ;
read lower data(blue) bx |= m_iic_read(0);
read upper data(intensity) ix = m_iic_read(0); ix <<= 8 ;
read lower data(intensity) ix |= m_iic_read(1);
stop condition m_iic_stop();
シーケンスがわかったので、ひとつの関数にまとめます。
void get_color()
{
byte i ;
byte j ;
word tmp ;
byte xx[8] ;
/*
preset gain mode exposure time (each color ch)
00 = 87.5us => 0.9ms
01 = 1.4ms => 2.0ms
10 = 22.4ms => 23ms
11 = 179.2ms => 180ms
*/
i = scmd & 3 ;
if ( i == 3 ) { tmp = 180 * 4; }
if ( i == 2 ) { tmp = 23 * 4; }
if ( i < 2 ) { tmp = 2 * 4; }
/* */
j = DEVICE_ID ;
j <<= 1 ;
j &= 0xFE ;
/* initialize */
m_iic_start();
m_iic_write(j);
m_iic_write(CONTROL_REG);
m_iic_write(0x83);
m_iic_start();
m_iic_write(j);
m_iic_write(CONTROL_REG);
/* set High or Low and exposure length */
m_iic_write(0x03);
m_iic_stop();
/* wait */
delay( tmp ) ;
/* read */
m_iic_start();
m_iic_write(j);
m_iic_write(0x03);
m_iic_start();
m_iic_write(j | ON);
/* get */
j = 0 ;
for ( i = 0 ; i < 8 ; i++ ) {
if ( i == 7 ) { j = 1 ; }
*(xx+i) = m_iic_read(j);
}
/* stop */
m_iic_stop();
/* store */
for ( i = 0 ; i < 4 ; i++ ) {
j = (i << 1);
tmp = *(xx+j) ;
tmp <<= 8 ;
tmp |= *(xx+j+1) ;
*(xrgbi+i) = tmp ;
}
}
端末で動作を確認してみました。
 問題なくカラーセンサーの情報を取得できています。
ハードウエアとソフトウエアの道具が揃ったので
2つのカラーセンサーから情報取得するスケッチ
を定義しました。
#include <MsTimer2.h>
#include <EEPROM.h>
#include "Wire.h"
#define OFF 0
#define ON OFF+1
#define LED_BIT 5
#define DEVICE_ID 0x2A
#define CONTROL_REG 0x00
#define NPER 800
#define SCODE_ADR 0x100
#define SHOW_ADR 0x101
#define MASK80 0x80
#define IIC_CNT 32
#define MSCL_BIT 3
#define MSDA_BIT 2
/* event flag */
boolean eflag ;
boolean tflag ;
boolean uflag ;
/* state flag */
boolean gflag ; /* select only green information */
boolean mflag ; /* mask flag */
/* timing counter */
byte xcnt ;
/* serial interface */
byte cmd ;
byte sindex ;
char sbuf[4] ;
/* RGB and IR */
word xrgbi[8] ;
/* sensor command */
byte scmd ;
/* which */
byte state ;
/* LED flashing */
void send_led(byte x)
{
if ( x ) { PORTB |= (1 << LED_BIT) ; }
else { PORTB &= ~(1 << LED_BIT) ; }
}
/* generate trigger */
void update_trigger(void)
{
/* LED flashing */
send_led( xcnt & ON );
/* trigger */
xcnt++ ;
if ( xcnt & ON ) { tflag = ON ; }
}
/* putchar on serial interface */
void rs_putchar(char x)
{
Serial.write(x);
}
/* puts on serial interface */
void rs_puts(char *x)
{
while ( *x ) {
rs_putchar( *x ) ;
x++ ;
}
}
/* new line */
void crlf()
{
rs_putchar('\r');
rs_putchar('\n');
}
void show_help()
{
rs_puts("? help") ; crlf();
rs_puts("E execute") ; crlf();
rs_puts("I idle") ; crlf();
rs_puts("C one shot") ; crlf();
rs_puts("S set sensibility 1:high 0:low") ; crlf();
rs_puts("L set exposure time Length(0/1/2/3)") ; crlf();
rs_puts("G set only Green information 1:YES 0:NO") ; crlf();
rs_puts("M set mask 1:YES 0:NO") ; crlf();
rs_puts("s show staus") ; crlf();
}
void show_value(word x)
{
word tmp ;
char msg[6] ;
byte i ;
/* copy */
tmp = x;
/* delimiter */
*(msg+5) = '\0' ;
/* separate */
for ( i = 0 ; i < 5 ; i++ ) {
/* value -> digit number */
*(msg+4-i) = (tmp % 10)+ '0' ;
/* next */
tmp /= 10 ;
}
/* zero surppress */
if ( x < 10000 ) {
*(msg+0) = ' ' ;
if ( x < 1000 ) {
*(msg+1) = ' ' ;
if ( x < 100 ) {
*(msg+2) = ' ' ;
if ( x < 10 ) {
*(msg+3) = ' ' ;
}
}
}
}
/* show */
rs_puts( msg ) ;
rs_putchar(' ');
}
void get_color()
{
byte i ;
word tmp ;
/*
preset gain mode exposure time (each color ch)
00 = 87.5us => 0.9ms
01 = 1.4ms => 2.0ms
10 = 22.4ms => 23ms
11 = 179.2ms => 180ms
*/
i = scmd & 3 ;
if ( i == 3 ) { tmp = 180 * 4; }
if ( i == 2 ) { tmp = 23 * 4; }
if ( i < 2 ) { tmp = 2 * 4; }
Wire.beginTransmission(DEVICE_ID);
Wire.write(CONTROL_REG);
Wire.write(0x83); /* reset ADC and wakeup */
Wire.endTransmission(OFF);
Wire.beginTransmission(DEVICE_ID);
Wire.write(CONTROL_REG);
/* set High or Low and exposure length */
Wire.write( scmd );
Wire.endTransmission(ON);
/* total exposure time */
delay(tmp);
/* get each color value */
Wire.beginTransmission(DEVICE_ID);
Wire.write(0x03);
Wire.endTransmission(OFF);
Wire.requestFrom(DEVICE_ID,8,ON);
/* 8 x 2 x 4 */
for ( i = 0 ; i < 4 ; i++ ) {
/* upper value */
tmp = Wire.read();
/* shift */
tmp <<= 8;
/* add lower value */
tmp |= Wire.read();
/* store */
*(xrgbi+i) = tmp ;
}
}
void m_iic_wait(void)
{
byte i ;
/* wait */
for ( i = 0 ; i < IIC_CNT ; i++ ) ;
}
void m_iic_scl(byte x)
{
/* impress */
if ( x ) { PORTC |= (1 << MSCL_BIT) ; }
else { PORTC &= ~(1 << MSCL_BIT) ; }
/* delay */
m_iic_wait();
}
void m_iic_start(void)
{
/* both H */
PORTC |= (3 << MSDA_BIT) ;
/* delay */
m_iic_wait();
/* 0 -> SDA */
PORTC &= ~(1 << MSDA_BIT) ;
/* delay */
m_iic_wait();
/* 0 -> SCL */
PORTC &= ~(1 << MSCL_BIT) ;
}
void m_iic_stop(void)
{
/* set level */
PORTC |= (1 << MSCL_BIT) ;
PORTC &= ~(1 << MSDA_BIT) ;
/* delay */
m_iic_wait();
/* 1 -> SDA */
PORTC |= (1 << MSDA_BIT) ;
/* delay */
m_iic_wait();
}
byte m_iic_write(byte x)
{
byte i ;
byte tmp ;
/* load raw data */
tmp = x ;
/* transfer data with write code */
for ( i = 0 ; i < 8 ; i++ ) {
/* send bit datum */
PORTC &= ~(1 << MSDA_BIT) ;
if ( tmp & MASK80 ) { PORTC |= (1 << MSDA_BIT) ; }
/* 1 -> SCL */
m_iic_scl(ON);
/* shift */
tmp <<= 1 ;
/* 0 -> SCL */
m_iic_scl(OFF);
}
PORTC &= ~(1 << MSDA_BIT) ;
/* change inupt */
DDRC &= ~(1 << MSDA_BIT) ;
/* 1 -> SCL */
m_iic_scl(ON);
/* get acknowledge */
tmp = (PINC & (1 << MSDA_BIT)) >> 2 ;
/* 0 -> SCL */
m_iic_scl(OFF);
/* change output */
DDRC |= (1 << MSDA_BIT) ;
return tmp ;
}
byte m_iic_read(byte x)
{
byte i;
byte result ;
/* change inupt */
PORTC &= ~(1 << MSDA_BIT) ;
DDRC &= ~(1 << MSDA_BIT) ;
/* default */
result = 0 ;
for ( i = 0 ; i < 8 ; i++ ) {
/* shift */
result <<= 1 ;
/* 1 -> SCL */
m_iic_scl(ON);
/* get bit datum */
if ( PINC & (1 << MSDA_BIT) ) { result |= ON ; }
/* 0 -> SCL */
m_iic_scl(OFF);
}
/* change output */
DDRC |= (1 << MSDA_BIT) ;
if ( x ) { PORTC |= (1 << MSDA_BIT); }
else { PORTC &= ~(1 << MSDA_BIT); }
/* 1 -> SCL */
m_iic_scl(ON);
/* 0 -> SCL */
m_iic_scl(OFF);
return result ;
}
void get_color2()
{
byte i ;
byte j ;
word tmp ;
byte xx[8] ;
/*
preset gain mode exposure time (each color ch)
00 = 87.5us => 0.9ms
01 = 1.4ms => 2.0ms
10 = 22.4ms => 23ms
11 = 179.2ms => 180ms
*/
i = scmd & 3 ;
if ( i == 3 ) { tmp = 180 * 4; }
if ( i == 2 ) { tmp = 23 * 4; }
if ( i < 2 ) { tmp = 2 * 4; }
/* */
j = DEVICE_ID ;
j <<= 1 ;
j &= 0xFE ;
/* initialize */
m_iic_start();
m_iic_write(j);
m_iic_write(CONTROL_REG);
m_iic_write(0x83);
m_iic_start();
m_iic_write(j);
m_iic_write(CONTROL_REG);
/* set High or Low and exposure length */
m_iic_write(0x03);
m_iic_stop();
/* wait */
delay( tmp ) ;
/* read */
m_iic_start();
m_iic_write(j);
m_iic_write(0x03);
m_iic_start();
m_iic_write(j | ON);
/* get */
j = 0 ;
for ( i = 0 ; i < 8 ; i++ ) {
if ( i == 7 ) { j = 1 ; }
*(xx+i) = m_iic_read(j);
}
/* stop */
m_iic_stop();
/* store */
for ( i = 0 ; i < 4 ; i++ ) {
j = (i << 1);
tmp = *(xx+j) ;
tmp <<= 8 ;
tmp |= *(xx+j+1) ;
*(xrgbi+i+4) = tmp ;
}
}
void show_yn()
{
char msg[2];
/* delimiter */
*(msg+1) = '\0' ;
/* sensibility */
{
*(msg+0) = 'L' ;
if ( scmd & 8 ) { *(msg+0) = 'H' ; }
rs_puts( msg );
}
/* exposure length */
{
rs_putchar( '0'+(scmd & 3) );
}
/* Green */
{
*(msg+0) = 'N' ;
if ( gflag == ON ) { *(msg+0) = 'Y' ; }
rs_puts( msg );
}
/* Mask */
{
*(msg+0) = 'N' ;
if ( mflag == ON ) { *(msg+0) = 'Y' ; }
rs_puts( msg );
}
/* new line */
crlf();
}
void store_param(byte which,byte x)
{
word madr ;
/* sensibility or exposure length */
if ( which < 2 ) { madr = SCODE_ADR ; }
/* Green information */
if ( which == 2 ) { madr = SHOW_ADR ; }
/* store */
EEPROM.write(madr,x);
}
void show_color(boolean x)
{
/* only Green information */
if ( x ) {
rs_puts("AG :") ; show_value( *(xrgbi+1) );
rs_puts("BG :") ; show_value( *(xrgbi+5) );
}
else
/* all color informations */
{
rs_puts("AR :") ; show_value( *(xrgbi+0) );
rs_puts("AG :") ; show_value( *(xrgbi+1) );
rs_puts("AB :") ; show_value( *(xrgbi+2) );
rs_puts("AIR:") ; show_value( *(xrgbi+3) );
rs_puts("BR :") ; show_value( *(xrgbi+4) );
rs_puts("BG :") ; show_value( *(xrgbi+5) );
rs_puts("BB :") ; show_value( *(xrgbi+6) );
rs_puts("BIR:") ; show_value( *(xrgbi+7) );
}
crlf();
}
void setup()
{
/* initialize serial port */
Serial.begin(9600);
sindex = 0 ;
/* set initial state */
PORTB = 0x00 ;
PORTC = 0x0C ;
PORTD = 0x01 ;
/* direction */
DDRB = 0xff ;
DDRC = 0xff ;
DDRD = 0xfe ;
/* clear flags */
tflag = OFF ;
eflag = OFF ;
uflag = OFF ;
gflag = OFF ;
/* resume previous state */
xcnt = EEPROM.read(SCODE_ADR);
if ( xcnt == 0xff ) {
scmd = 11 ;
EEPROM.write(SCODE_ADR,scmd);
} else {
scmd = xcnt ;
}
xcnt = EEPROM.read(SHOW_ADR);
if ( xcnt != OFF ) { gflag = ON ; }
/* initialize variables */
for ( xcnt = 0 ; xcnt < 4 ; xcnt++ ) {
*(xrgbi+xcnt) = 0 ;
}
xcnt = 0 ;
state = 0 ;
/* trigger period */
MsTimer2::set(NPER,update_trigger);
/* enable */
MsTimer2::start();
/* enable I2C bus interface */
Wire.begin();
}
void loop()
{
/* serial handling */
if ( uflag == ON ) {
/* clear flag */
uflag = OFF ;
/* new line */
crlf();
/* get command */
cmd = *(sbuf+0) ;
/* help */
if ( cmd == '?' ) { show_help() ; }
/* enable */
if ( cmd == 'E' ) { eflag = ON ; }
/* disable */
if ( cmd == 'I' ) { eflag = OFF ; }
/* one shot */
if ( cmd == 'C' ) {
/* get color values */
get_color();
get_color2();
/* show */
show_color(gflag);
}
/* write sensibility state */
if ( cmd == 'S' ) {
/* set default (selct LOW) */
scmd &= 0xf7 ;
/* set flag (HIGH or LOW) */
if ( *(sbuf+1) == '1' ) { scmd |= (1 << 3) ; }
/* store EEPROM */
store_param(0,scmd);
}
/* write exposure length */
if ( cmd == 'L' ) {
/* clear */
scmd &= 0xfc ;
/* generate code */
scmd |= ((*(sbuf+1) - '0') & 3);
/* store EEPROM */
store_param(1,scmd);
}
/* write only Green information */
if ( cmd == 'G' ) {
/* default */
gflag = OFF ;
/* judge */
if ( *(sbuf+1) == '1' ) { gflag = ON ; }
/* store */
store_param(2,gflag);
}
/* write mask */
if ( cmd == 'M' ) {
/* default */
mflag = OFF ;
/* judge */
if ( *(sbuf+1) == '1' ) { mflag = ON ; }
}
/* show status */
if ( cmd == 's' ) { show_yn(); }
}
/* timer handling */
if ( tflag == ON ) {
/* clear flag */
tflag = OFF ;
/* get color values */
if ( state ) { get_color2(); }
else { get_color(); }
/* update state */
state++ ;
state &= ON ;
/* show */
if ( eflag ) { show_color(gflag) ; }
}
}
/* receive interrupt */
void serialEvent()
{
char ch;
if ( Serial.available() > 0 ) {
/* get 1 character */
ch = Serial.read();
/* store */
*(sbuf+sindex) = ch ;
/* increment */
sindex++ ;
/* judge */
if ( ch == '\r' ) {
sindex = 0 ;
uflag = ON ;
}
}
}
カラーセンサーのどちらを利用するのかで関数を分けて
あります。get_color()がArduinoの内蔵ハードウエアを
利用します。get_color2()は、GPIOを利用したIICバス
でセンサー情報を取得します。
センサーが2個になったので、情報量は2倍となります。
word指定の配列のサイズを4から8とします。
get_color2()は、センサー情報を配列に格納するとき
オフセットの4をつけて対応しました。
タイマー割込みで、どちらのセンサーから情報を取得
するのかは、ステートマシンを利用して記述してます。
変数stateを用意し、0か1のいずれの値しか持たない
ように、からくりを用意しました。
/* get color values */
if ( state ) { get_color2(); }
else { get_color(); }
/* update state */
state++ ;
state &= ON ;
このスケッチで、2つのセンサーの情報を取得すると
次のようになります。
問題なくカラーセンサーの情報を取得できています。
ハードウエアとソフトウエアの道具が揃ったので
2つのカラーセンサーから情報取得するスケッチ
を定義しました。
#include <MsTimer2.h>
#include <EEPROM.h>
#include "Wire.h"
#define OFF 0
#define ON OFF+1
#define LED_BIT 5
#define DEVICE_ID 0x2A
#define CONTROL_REG 0x00
#define NPER 800
#define SCODE_ADR 0x100
#define SHOW_ADR 0x101
#define MASK80 0x80
#define IIC_CNT 32
#define MSCL_BIT 3
#define MSDA_BIT 2
/* event flag */
boolean eflag ;
boolean tflag ;
boolean uflag ;
/* state flag */
boolean gflag ; /* select only green information */
boolean mflag ; /* mask flag */
/* timing counter */
byte xcnt ;
/* serial interface */
byte cmd ;
byte sindex ;
char sbuf[4] ;
/* RGB and IR */
word xrgbi[8] ;
/* sensor command */
byte scmd ;
/* which */
byte state ;
/* LED flashing */
void send_led(byte x)
{
if ( x ) { PORTB |= (1 << LED_BIT) ; }
else { PORTB &= ~(1 << LED_BIT) ; }
}
/* generate trigger */
void update_trigger(void)
{
/* LED flashing */
send_led( xcnt & ON );
/* trigger */
xcnt++ ;
if ( xcnt & ON ) { tflag = ON ; }
}
/* putchar on serial interface */
void rs_putchar(char x)
{
Serial.write(x);
}
/* puts on serial interface */
void rs_puts(char *x)
{
while ( *x ) {
rs_putchar( *x ) ;
x++ ;
}
}
/* new line */
void crlf()
{
rs_putchar('\r');
rs_putchar('\n');
}
void show_help()
{
rs_puts("? help") ; crlf();
rs_puts("E execute") ; crlf();
rs_puts("I idle") ; crlf();
rs_puts("C one shot") ; crlf();
rs_puts("S set sensibility 1:high 0:low") ; crlf();
rs_puts("L set exposure time Length(0/1/2/3)") ; crlf();
rs_puts("G set only Green information 1:YES 0:NO") ; crlf();
rs_puts("M set mask 1:YES 0:NO") ; crlf();
rs_puts("s show staus") ; crlf();
}
void show_value(word x)
{
word tmp ;
char msg[6] ;
byte i ;
/* copy */
tmp = x;
/* delimiter */
*(msg+5) = '\0' ;
/* separate */
for ( i = 0 ; i < 5 ; i++ ) {
/* value -> digit number */
*(msg+4-i) = (tmp % 10)+ '0' ;
/* next */
tmp /= 10 ;
}
/* zero surppress */
if ( x < 10000 ) {
*(msg+0) = ' ' ;
if ( x < 1000 ) {
*(msg+1) = ' ' ;
if ( x < 100 ) {
*(msg+2) = ' ' ;
if ( x < 10 ) {
*(msg+3) = ' ' ;
}
}
}
}
/* show */
rs_puts( msg ) ;
rs_putchar(' ');
}
void get_color()
{
byte i ;
word tmp ;
/*
preset gain mode exposure time (each color ch)
00 = 87.5us => 0.9ms
01 = 1.4ms => 2.0ms
10 = 22.4ms => 23ms
11 = 179.2ms => 180ms
*/
i = scmd & 3 ;
if ( i == 3 ) { tmp = 180 * 4; }
if ( i == 2 ) { tmp = 23 * 4; }
if ( i < 2 ) { tmp = 2 * 4; }
Wire.beginTransmission(DEVICE_ID);
Wire.write(CONTROL_REG);
Wire.write(0x83); /* reset ADC and wakeup */
Wire.endTransmission(OFF);
Wire.beginTransmission(DEVICE_ID);
Wire.write(CONTROL_REG);
/* set High or Low and exposure length */
Wire.write( scmd );
Wire.endTransmission(ON);
/* total exposure time */
delay(tmp);
/* get each color value */
Wire.beginTransmission(DEVICE_ID);
Wire.write(0x03);
Wire.endTransmission(OFF);
Wire.requestFrom(DEVICE_ID,8,ON);
/* 8 x 2 x 4 */
for ( i = 0 ; i < 4 ; i++ ) {
/* upper value */
tmp = Wire.read();
/* shift */
tmp <<= 8;
/* add lower value */
tmp |= Wire.read();
/* store */
*(xrgbi+i) = tmp ;
}
}
void m_iic_wait(void)
{
byte i ;
/* wait */
for ( i = 0 ; i < IIC_CNT ; i++ ) ;
}
void m_iic_scl(byte x)
{
/* impress */
if ( x ) { PORTC |= (1 << MSCL_BIT) ; }
else { PORTC &= ~(1 << MSCL_BIT) ; }
/* delay */
m_iic_wait();
}
void m_iic_start(void)
{
/* both H */
PORTC |= (3 << MSDA_BIT) ;
/* delay */
m_iic_wait();
/* 0 -> SDA */
PORTC &= ~(1 << MSDA_BIT) ;
/* delay */
m_iic_wait();
/* 0 -> SCL */
PORTC &= ~(1 << MSCL_BIT) ;
}
void m_iic_stop(void)
{
/* set level */
PORTC |= (1 << MSCL_BIT) ;
PORTC &= ~(1 << MSDA_BIT) ;
/* delay */
m_iic_wait();
/* 1 -> SDA */
PORTC |= (1 << MSDA_BIT) ;
/* delay */
m_iic_wait();
}
byte m_iic_write(byte x)
{
byte i ;
byte tmp ;
/* load raw data */
tmp = x ;
/* transfer data with write code */
for ( i = 0 ; i < 8 ; i++ ) {
/* send bit datum */
PORTC &= ~(1 << MSDA_BIT) ;
if ( tmp & MASK80 ) { PORTC |= (1 << MSDA_BIT) ; }
/* 1 -> SCL */
m_iic_scl(ON);
/* shift */
tmp <<= 1 ;
/* 0 -> SCL */
m_iic_scl(OFF);
}
PORTC &= ~(1 << MSDA_BIT) ;
/* change inupt */
DDRC &= ~(1 << MSDA_BIT) ;
/* 1 -> SCL */
m_iic_scl(ON);
/* get acknowledge */
tmp = (PINC & (1 << MSDA_BIT)) >> 2 ;
/* 0 -> SCL */
m_iic_scl(OFF);
/* change output */
DDRC |= (1 << MSDA_BIT) ;
return tmp ;
}
byte m_iic_read(byte x)
{
byte i;
byte result ;
/* change inupt */
PORTC &= ~(1 << MSDA_BIT) ;
DDRC &= ~(1 << MSDA_BIT) ;
/* default */
result = 0 ;
for ( i = 0 ; i < 8 ; i++ ) {
/* shift */
result <<= 1 ;
/* 1 -> SCL */
m_iic_scl(ON);
/* get bit datum */
if ( PINC & (1 << MSDA_BIT) ) { result |= ON ; }
/* 0 -> SCL */
m_iic_scl(OFF);
}
/* change output */
DDRC |= (1 << MSDA_BIT) ;
if ( x ) { PORTC |= (1 << MSDA_BIT); }
else { PORTC &= ~(1 << MSDA_BIT); }
/* 1 -> SCL */
m_iic_scl(ON);
/* 0 -> SCL */
m_iic_scl(OFF);
return result ;
}
void get_color2()
{
byte i ;
byte j ;
word tmp ;
byte xx[8] ;
/*
preset gain mode exposure time (each color ch)
00 = 87.5us => 0.9ms
01 = 1.4ms => 2.0ms
10 = 22.4ms => 23ms
11 = 179.2ms => 180ms
*/
i = scmd & 3 ;
if ( i == 3 ) { tmp = 180 * 4; }
if ( i == 2 ) { tmp = 23 * 4; }
if ( i < 2 ) { tmp = 2 * 4; }
/* */
j = DEVICE_ID ;
j <<= 1 ;
j &= 0xFE ;
/* initialize */
m_iic_start();
m_iic_write(j);
m_iic_write(CONTROL_REG);
m_iic_write(0x83);
m_iic_start();
m_iic_write(j);
m_iic_write(CONTROL_REG);
/* set High or Low and exposure length */
m_iic_write(0x03);
m_iic_stop();
/* wait */
delay( tmp ) ;
/* read */
m_iic_start();
m_iic_write(j);
m_iic_write(0x03);
m_iic_start();
m_iic_write(j | ON);
/* get */
j = 0 ;
for ( i = 0 ; i < 8 ; i++ ) {
if ( i == 7 ) { j = 1 ; }
*(xx+i) = m_iic_read(j);
}
/* stop */
m_iic_stop();
/* store */
for ( i = 0 ; i < 4 ; i++ ) {
j = (i << 1);
tmp = *(xx+j) ;
tmp <<= 8 ;
tmp |= *(xx+j+1) ;
*(xrgbi+i+4) = tmp ;
}
}
void show_yn()
{
char msg[2];
/* delimiter */
*(msg+1) = '\0' ;
/* sensibility */
{
*(msg+0) = 'L' ;
if ( scmd & 8 ) { *(msg+0) = 'H' ; }
rs_puts( msg );
}
/* exposure length */
{
rs_putchar( '0'+(scmd & 3) );
}
/* Green */
{
*(msg+0) = 'N' ;
if ( gflag == ON ) { *(msg+0) = 'Y' ; }
rs_puts( msg );
}
/* Mask */
{
*(msg+0) = 'N' ;
if ( mflag == ON ) { *(msg+0) = 'Y' ; }
rs_puts( msg );
}
/* new line */
crlf();
}
void store_param(byte which,byte x)
{
word madr ;
/* sensibility or exposure length */
if ( which < 2 ) { madr = SCODE_ADR ; }
/* Green information */
if ( which == 2 ) { madr = SHOW_ADR ; }
/* store */
EEPROM.write(madr,x);
}
void show_color(boolean x)
{
/* only Green information */
if ( x ) {
rs_puts("AG :") ; show_value( *(xrgbi+1) );
rs_puts("BG :") ; show_value( *(xrgbi+5) );
}
else
/* all color informations */
{
rs_puts("AR :") ; show_value( *(xrgbi+0) );
rs_puts("AG :") ; show_value( *(xrgbi+1) );
rs_puts("AB :") ; show_value( *(xrgbi+2) );
rs_puts("AIR:") ; show_value( *(xrgbi+3) );
rs_puts("BR :") ; show_value( *(xrgbi+4) );
rs_puts("BG :") ; show_value( *(xrgbi+5) );
rs_puts("BB :") ; show_value( *(xrgbi+6) );
rs_puts("BIR:") ; show_value( *(xrgbi+7) );
}
crlf();
}
void setup()
{
/* initialize serial port */
Serial.begin(9600);
sindex = 0 ;
/* set initial state */
PORTB = 0x00 ;
PORTC = 0x0C ;
PORTD = 0x01 ;
/* direction */
DDRB = 0xff ;
DDRC = 0xff ;
DDRD = 0xfe ;
/* clear flags */
tflag = OFF ;
eflag = OFF ;
uflag = OFF ;
gflag = OFF ;
/* resume previous state */
xcnt = EEPROM.read(SCODE_ADR);
if ( xcnt == 0xff ) {
scmd = 11 ;
EEPROM.write(SCODE_ADR,scmd);
} else {
scmd = xcnt ;
}
xcnt = EEPROM.read(SHOW_ADR);
if ( xcnt != OFF ) { gflag = ON ; }
/* initialize variables */
for ( xcnt = 0 ; xcnt < 4 ; xcnt++ ) {
*(xrgbi+xcnt) = 0 ;
}
xcnt = 0 ;
state = 0 ;
/* trigger period */
MsTimer2::set(NPER,update_trigger);
/* enable */
MsTimer2::start();
/* enable I2C bus interface */
Wire.begin();
}
void loop()
{
/* serial handling */
if ( uflag == ON ) {
/* clear flag */
uflag = OFF ;
/* new line */
crlf();
/* get command */
cmd = *(sbuf+0) ;
/* help */
if ( cmd == '?' ) { show_help() ; }
/* enable */
if ( cmd == 'E' ) { eflag = ON ; }
/* disable */
if ( cmd == 'I' ) { eflag = OFF ; }
/* one shot */
if ( cmd == 'C' ) {
/* get color values */
get_color();
get_color2();
/* show */
show_color(gflag);
}
/* write sensibility state */
if ( cmd == 'S' ) {
/* set default (selct LOW) */
scmd &= 0xf7 ;
/* set flag (HIGH or LOW) */
if ( *(sbuf+1) == '1' ) { scmd |= (1 << 3) ; }
/* store EEPROM */
store_param(0,scmd);
}
/* write exposure length */
if ( cmd == 'L' ) {
/* clear */
scmd &= 0xfc ;
/* generate code */
scmd |= ((*(sbuf+1) - '0') & 3);
/* store EEPROM */
store_param(1,scmd);
}
/* write only Green information */
if ( cmd == 'G' ) {
/* default */
gflag = OFF ;
/* judge */
if ( *(sbuf+1) == '1' ) { gflag = ON ; }
/* store */
store_param(2,gflag);
}
/* write mask */
if ( cmd == 'M' ) {
/* default */
mflag = OFF ;
/* judge */
if ( *(sbuf+1) == '1' ) { mflag = ON ; }
}
/* show status */
if ( cmd == 's' ) { show_yn(); }
}
/* timer handling */
if ( tflag == ON ) {
/* clear flag */
tflag = OFF ;
/* get color values */
if ( state ) { get_color2(); }
else { get_color(); }
/* update state */
state++ ;
state &= ON ;
/* show */
if ( eflag ) { show_color(gflag) ; }
}
}
/* receive interrupt */
void serialEvent()
{
char ch;
if ( Serial.available() > 0 ) {
/* get 1 character */
ch = Serial.read();
/* store */
*(sbuf+sindex) = ch ;
/* increment */
sindex++ ;
/* judge */
if ( ch == '\r' ) {
sindex = 0 ;
uflag = ON ;
}
}
}
カラーセンサーのどちらを利用するのかで関数を分けて
あります。get_color()がArduinoの内蔵ハードウエアを
利用します。get_color2()は、GPIOを利用したIICバス
でセンサー情報を取得します。
センサーが2個になったので、情報量は2倍となります。
word指定の配列のサイズを4から8とします。
get_color2()は、センサー情報を配列に格納するとき
オフセットの4をつけて対応しました。
タイマー割込みで、どちらのセンサーから情報を取得
するのかは、ステートマシンを利用して記述してます。
変数stateを用意し、0か1のいずれの値しか持たない
ように、からくりを用意しました。
/* get color values */
if ( state ) { get_color2(); }
else { get_color(); }
/* update state */
state++ ;
state &= ON ;
このスケッチで、2つのセンサーの情報を取得すると
次のようになります。
 緑だけを抜き出すと、次のような端末表示です。
緑だけを抜き出すと、次のような端末表示です。
 Arduino、カラーセンサー、電圧変換モジュールの接続は、以下。
Arduino、カラーセンサー、電圧変換モジュールの接続は、以下。
 A5、A4は、Arduinoの内蔵IICバス専用モジュールに接続される
ので、プルアップする電源電圧が3.3Vでも、問題ありません。
GPIOとして使う、A3、A2は、5Vインタフェースで扱うように
しておきます。カラーセンサーには、3.3Vを与えます。
電圧変換モジュール上にプルアップ抵抗があるため、外付けの
抵抗は不要。
エンハンスメントタイプのMOSFETを利用したインタフェースを
半田付けして、テストしてみました。
A5、A4は、Arduinoの内蔵IICバス専用モジュールに接続される
ので、プルアップする電源電圧が3.3Vでも、問題ありません。
GPIOとして使う、A3、A2は、5Vインタフェースで扱うように
しておきます。カラーセンサーには、3.3Vを与えます。
電圧変換モジュール上にプルアップ抵抗があるため、外付けの
抵抗は不要。
エンハンスメントタイプのMOSFETを利用したインタフェースを
半田付けして、テストしてみました。
 回路は、以下。
回路は、以下。
 この回路では、Wireライブラリを使うと動作しなかったので
GPIOを使ったスケッチにしました。
2つのチャネルを(A5,A4)=(SCL,SDA)=(D19,D18)、(A3,A2)=(SCL,SDA)=(D17,D16)
に割り当てました。
#include <MsTimer2.h>
#include <EEPROM.h>
#define OFF 0
#define ON OFF+1
#define MASCL_BIT 5
#define MASDA_BIT 4
#define MBSCL_BIT 3
#define MBSDA_BIT 2
#define MASK80 0x80
#define IIC_CNT 32
#define LED_BIT 5
#define DEVICE_ID 0x2A
#define CONTROL_REG 0x00
#define NPER 800
#define SCODE_ADR 0x100
#define SHOW_ADR 0x101
/* event flag */
boolean eflag ;
boolean tflag ;
boolean uflag ;
/* state flag */
boolean gflag ; /* select only green information */
boolean mflag ; /* mask flag */
/* timing counter */
byte xcnt ;
/* serial interface */
byte cmd ;
byte sindex ;
char sbuf[4] ;
/* RGB and IR */
word xrgbi[8] ;
/* sensor command */
byte scmd ;
/* which sensor */
byte state ;
/* LED flashing */
void send_led(byte x)
{
if ( x ) { PORTB |= (1 << LED_BIT) ; }
else { PORTB &= ~(1 << LED_BIT) ; }
}
/* generate trigger */
void update_trigger(void)
{
/* LED flashing */
send_led( xcnt & ON );
/* trigger */
xcnt++ ;
if ( xcnt & ON ) { tflag = ON ; }
}
/* putchar on serial interface */
void rs_putchar(char x)
{
Serial.write(x);
}
/* puts on serial interface */
void rs_puts(char *x)
{
while ( *x ) {
rs_putchar( *x );
x++ ;
}
}
/* new line */
void crlf()
{
rs_putchar('\r');
rs_putchar('\n');
}
void show_help()
{
rs_puts("? help") ; crlf();
rs_puts("E execute") ; crlf();
rs_puts("I idle") ; crlf();
rs_puts("C one shot") ; crlf();
rs_puts("S set sensibility 1:high 0:low") ; crlf();
rs_puts("L set exposure time Length(0/1/2/3)") ; crlf();
rs_puts("G set only Green information 1:YES 0:NO") ; crlf();
rs_puts("M set mask 1:YES 0:NO") ; crlf();
rs_puts("s show staus") ; crlf();
}
void show_value(word x)
{
word tmp ;
char msg[6] ;
byte i ;
/* copy */
tmp = x;
/* delimiter */
*(msg+5) = '\0' ;
/* separate */
for ( i = 0 ; i < 5 ; i++ ) {
/* value -> digit number */
*(msg+4-i) = (tmp % 10)+ '0' ;
/* next */
tmp /= 10 ;
}
/* zero surppress */
if ( x < 10000 ) {
*(msg+0) = ' ' ;
if ( x < 1000 ) {
*(msg+1) = ' ' ;
if ( x < 100 ) {
*(msg+2) = ' ' ;
if ( x < 10 ) {
*(msg+3) = ' ' ;
}
}
}
}
/* show */
rs_puts( msg ) ;
rs_putchar(' ');
}
void m_iic_wait(void)
{
byte i ;
/* wait */
for ( i = 0 ; i < IIC_CNT ; i++ ) ;
}
void m_iic_scl(byte x,boolean wx)
{
byte xx ;
/* channel A */
xx = MASCL_BIT ;
/* channel B */
if ( wx ) { xx = MBSCL_BIT ; }
/* impress */
if ( x ) { PORTC |= (1 << xx) ; }
else { PORTC &= ~(1 << xx) ; }
/* delay */
m_iic_wait();
}
void m_iic_start(boolean wx)
{
byte xx ;
byte yy ;
/* channel A */
xx = MASDA_BIT ;
/* channel B */
if ( wx ) { xx = MBSDA_BIT ; }
yy = xx+1 ;
/* both H */
PORTC |= (3 << xx) ;
/* delay */
m_iic_wait();
/* 0 -> SDA */
PORTC &= ~(1 << xx) ;
/* delay */
m_iic_wait();
/* 0 -> SCL */
PORTC &= ~(1 << yy) ;
}
void m_iic_stop(boolean wx)
{
byte xx ;
byte yy ;
/* channel A */
xx = MASDA_BIT ;
/* channel B */
if ( wx ) { xx = MBSDA_BIT ; }
yy = xx+1 ;
/* set level */
PORTC |= (1 << yy) ;
PORTC &= ~(1 << xx) ;
/* delay */
m_iic_wait();
/* 1 -> SDA */
PORTC |= (1 << xx) ;
/* delay */
m_iic_wait();
}
byte m_iic_write(byte x,boolean wx)
{
byte i ;
byte tmp ;
byte xx ;
/* send bit datum */
xx = MASDA_BIT ;
if ( wx ) { xx = MBSDA_BIT ; }
/* load raw data */
tmp = x ;
/* transfer data with write code */
for ( i = 0 ; i < 8 ; i++ ) {
/* impress datum */
PORTC &= ~(1 << xx) ;
if ( tmp & MASK80 ) { PORTC |= (1 << xx) ; }
/* 1 -> SCL */
m_iic_scl(ON,wx);
/* shift */
tmp <<= 1 ;
/* 0 -> SCL */
m_iic_scl(OFF,wx);
}
PORTC &= ~(1 << xx) ;
/* change inupt */
DDRC &= ~(1 << xx) ;
/* 1 -> SCL */
m_iic_scl(ON,wx);
/* get acknowledge */
tmp = (PINC & (1 << xx)) >> xx ;
/* 0 -> SCL */
m_iic_scl(OFF,wx);
/* change output */
DDRC |= (1 << xx) ;
return tmp ;
}
byte m_iic_read(byte x,boolean wx)
{
byte i;
byte result ;
byte xx ;
/* channel A */
xx = MASDA_BIT ;
/* channel B */
if ( wx ) { xx = MBSDA_BIT ; }
/* change inupt */
PORTC &= ~(1 << xx) ;
DDRC &= ~(1 << xx) ;
/* default */
result = 0 ;
for ( i = 0 ; i < 8 ; i++ ) {
/* shift */
result <<= 1 ;
/* 1 -> SCL */
m_iic_scl(ON,wx);
/* 0 -> SCL */
m_iic_scl(OFF,wx);
/* get bit datum */
if ( PINC & (1 << xx) ) { result |= ON ; }
}
/* change output */
DDRC |= (1 << xx) ;
if ( x ) { PORTC |= (1 << xx); }
else { PORTC &= ~(1 << xx); }
/* 1 -> SCL */
m_iic_scl(ON,wx);
/* 0 -> SCL */
m_iic_scl(OFF,wx);
return result ;
}
void get_color(boolean wx)
{
byte i ;
byte j ;
word tmp ;
byte xx[8] ;
/*
preset gain mode exposure time (each color ch)
00 = 87.5us => 0.9ms
01 = 1.4ms => 2.0ms
10 = 22.4ms => 23ms
11 = 179.2ms => 180ms
*/
i = scmd & 3 ;
if ( i == 3 ) { tmp = 180 * 4; }
if ( i == 2 ) { tmp = 23 * 4; }
if ( i < 2 ) { tmp = 2 * 4; }
/* */
j = DEVICE_ID ;
j <<= 1 ;
j &= 0xFE ;
/* initialize */
m_iic_start(wx);
m_iic_write(j,wx);
m_iic_write(CONTROL_REG,wx);
m_iic_write(0x83,wx);
m_iic_start(wx);
m_iic_write(j,wx);
m_iic_write(CONTROL_REG,wx);
/* set High or Low and exposure length */
m_iic_write(0x03,wx);
m_iic_stop(wx);
/* wait */
delay( tmp ) ;
/* read */
m_iic_start(wx);
m_iic_write(j,wx);
m_iic_write(0x03,wx);
m_iic_start(wx);
m_iic_write(j | ON,wx);
/* get */
j = 0 ;
for ( i = 0 ; i < 8 ; i++ ) {
if ( i == 7 ) { j = 1 ; }
*(xx+i) = m_iic_read(j,wx);
}
/* stop */
m_iic_stop(wx);
/* store */
for ( i = 0 ; i < 4 ; i++ ) {
j = (i << 1);
tmp = *(xx+j) ;
tmp <<= 8 ;
tmp |= *(xx+j+1) ;
*(xrgbi+i+4*wx) = tmp ;
}
}
void show_yn()
{
char msg[2];
/* delimiter */
*(msg+1) = '\0' ;
/* sensibility */
{
*(msg+0) = 'L' ;
if ( scmd & 8 ) { *(msg+0) = 'H' ; }
rs_puts( msg );
}
/* exposure length */
{
rs_putchar( '0'+(scmd & 3) );
}
/* Green */
{
*(msg+0) = 'N' ;
if ( gflag == ON ) { *(msg+0) = 'Y' ; }
rs_puts( msg );
}
/* Mask */
{
*(msg+0) = 'N' ;
if ( mflag == ON ) { *(msg+0) = 'Y' ; }
rs_puts( msg );
}
/* new line */
crlf();
}
void store_param(byte which,byte x)
{
word madr ;
/* sensibility or exposure length */
if ( which < 2 ) { madr = SCODE_ADR ; }
/* Green information */
if ( which == 2 ) { madr = SHOW_ADR ; }
/* store */
EEPROM.write(madr,x);
}
void show_color(boolean x)
{
/* only Green information */
if ( x ) {
rs_puts("AG :") ; show_value( *(xrgbi+1) );
rs_puts("BG :") ; show_value( *(xrgbi+5) );
}
else
/* all color informations */
{
rs_puts("AR :") ; show_value( *(xrgbi+0) );
rs_puts("AG :") ; show_value( *(xrgbi+1) );
rs_puts("AB :") ; show_value( *(xrgbi+2) );
rs_puts("AIR:") ; show_value( *(xrgbi+3) );
rs_puts("BR :") ; show_value( *(xrgbi+4) );
rs_puts("BG :") ; show_value( *(xrgbi+5) );
rs_puts("BB :") ; show_value( *(xrgbi+6) );
rs_puts("BIR:") ; show_value( *(xrgbi+7) );
}
crlf();
}
void setup()
{
/* initialize serial port */
Serial.begin(9600);
sindex = 0 ;
/* set initial state */
PORTB = 0x00 ;
PORTC = 0x0C ;
PORTD = 0x01 ;
/* direction */
DDRB = 0xff ;
DDRC = 0xff ;
DDRD = 0xfe ;
/* clear flags */
tflag = OFF ;
eflag = OFF ;
uflag = OFF ;
gflag = OFF ;
/* resume previous state */
xcnt = EEPROM.read(SCODE_ADR);
if ( xcnt == 0xff ) {
scmd = 11 ;
EEPROM.write(SCODE_ADR,scmd);
} else {
scmd = xcnt ;
}
xcnt = EEPROM.read(SHOW_ADR);
if ( xcnt != OFF ) { gflag = ON ; }
/* initialize variables */
xcnt = 0 ;
for ( xcnt = 0 ; xcnt < 8 ; xcnt++ ) { *(xrgbi+xcnt) = 0 ; }
state = 0 ;
/* trigger period */
MsTimer2::set(NPER,update_trigger);
/* enable */
MsTimer2::start();
}
void loop()
{
/* serial handling */
if ( uflag == ON ) {
/* clear flag */
uflag = OFF ;
/* new line */
crlf();
/* get command */
cmd = *(sbuf+0) ;
/* help */
if ( cmd == '?' ) { show_help() ; }
/* enable */
if ( cmd == 'E' ) { eflag = ON ; }
/* disable */
if ( cmd == 'I' ) { eflag = OFF ; }
/* one shot */
if ( cmd == 'C' ) {
/* get color values */
get_color(OFF);
get_color(ON);
/* show */
show_color(gflag);
}
/* write sensibility state */
if ( cmd == 'S' ) {
/* set default (selct LOW) */
scmd &= 0xf7 ;
/* set flag (HIGH or LOW) */
if ( *(sbuf+1) == '1' ) { scmd |= (1 << 3) ; }
/* store EEPROM */
store_param(0,scmd);
}
/* write exposure length */
if ( cmd == 'L' ) {
/* clear */
scmd &= 0xfc ;
/* generate code */
scmd |= ((*(sbuf+1) - '0') & 3);
/* store EEPROM */
store_param(1,scmd);
}
/* write only Green information */
if ( cmd == 'G' ) {
/* default */
gflag = OFF ;
/* judge */
if ( *(sbuf+1) == '1' ) { gflag = ON ; }
/* store */
store_param(2,gflag);
}
/* write mask */
if ( cmd == 'M' ) {
/* default */
mflag = OFF ;
/* judge */
if ( *(sbuf+1) == '1' ) { mflag = ON ; }
}
/* show status */
if ( cmd == 's' ) { show_yn(); }
}
/* timer handling */
if ( tflag == ON ) {
/* clear flag */
tflag = OFF ;
/* get color values */
get_color(state);
state++ ;
state &= ON ;
/* show */
if ( eflag == ON ) { show_color(gflag) ; }
}
}
/* receive interrupt */
void serialEvent()
{
char ch;
if ( Serial.available() > 0 ) {
/* get 1 character */
ch = Serial.read();
/* store */
*(sbuf+sindex) = ch ;
/* increment */
sindex++ ;
/* judge */
if ( ch == '\r' ) {
sindex = 0 ;
uflag = ON ;
}
}
}
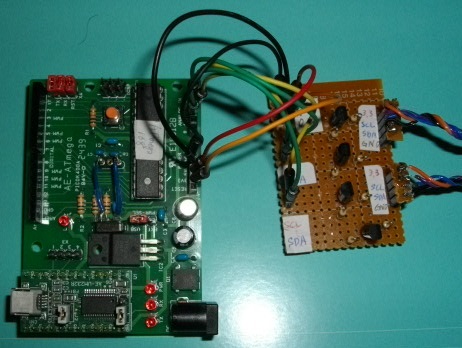
Arduinoと変換基板の接続は、次のようになります。
この回路では、Wireライブラリを使うと動作しなかったので
GPIOを使ったスケッチにしました。
2つのチャネルを(A5,A4)=(SCL,SDA)=(D19,D18)、(A3,A2)=(SCL,SDA)=(D17,D16)
に割り当てました。
#include <MsTimer2.h>
#include <EEPROM.h>
#define OFF 0
#define ON OFF+1
#define MASCL_BIT 5
#define MASDA_BIT 4
#define MBSCL_BIT 3
#define MBSDA_BIT 2
#define MASK80 0x80
#define IIC_CNT 32
#define LED_BIT 5
#define DEVICE_ID 0x2A
#define CONTROL_REG 0x00
#define NPER 800
#define SCODE_ADR 0x100
#define SHOW_ADR 0x101
/* event flag */
boolean eflag ;
boolean tflag ;
boolean uflag ;
/* state flag */
boolean gflag ; /* select only green information */
boolean mflag ; /* mask flag */
/* timing counter */
byte xcnt ;
/* serial interface */
byte cmd ;
byte sindex ;
char sbuf[4] ;
/* RGB and IR */
word xrgbi[8] ;
/* sensor command */
byte scmd ;
/* which sensor */
byte state ;
/* LED flashing */
void send_led(byte x)
{
if ( x ) { PORTB |= (1 << LED_BIT) ; }
else { PORTB &= ~(1 << LED_BIT) ; }
}
/* generate trigger */
void update_trigger(void)
{
/* LED flashing */
send_led( xcnt & ON );
/* trigger */
xcnt++ ;
if ( xcnt & ON ) { tflag = ON ; }
}
/* putchar on serial interface */
void rs_putchar(char x)
{
Serial.write(x);
}
/* puts on serial interface */
void rs_puts(char *x)
{
while ( *x ) {
rs_putchar( *x );
x++ ;
}
}
/* new line */
void crlf()
{
rs_putchar('\r');
rs_putchar('\n');
}
void show_help()
{
rs_puts("? help") ; crlf();
rs_puts("E execute") ; crlf();
rs_puts("I idle") ; crlf();
rs_puts("C one shot") ; crlf();
rs_puts("S set sensibility 1:high 0:low") ; crlf();
rs_puts("L set exposure time Length(0/1/2/3)") ; crlf();
rs_puts("G set only Green information 1:YES 0:NO") ; crlf();
rs_puts("M set mask 1:YES 0:NO") ; crlf();
rs_puts("s show staus") ; crlf();
}
void show_value(word x)
{
word tmp ;
char msg[6] ;
byte i ;
/* copy */
tmp = x;
/* delimiter */
*(msg+5) = '\0' ;
/* separate */
for ( i = 0 ; i < 5 ; i++ ) {
/* value -> digit number */
*(msg+4-i) = (tmp % 10)+ '0' ;
/* next */
tmp /= 10 ;
}
/* zero surppress */
if ( x < 10000 ) {
*(msg+0) = ' ' ;
if ( x < 1000 ) {
*(msg+1) = ' ' ;
if ( x < 100 ) {
*(msg+2) = ' ' ;
if ( x < 10 ) {
*(msg+3) = ' ' ;
}
}
}
}
/* show */
rs_puts( msg ) ;
rs_putchar(' ');
}
void m_iic_wait(void)
{
byte i ;
/* wait */
for ( i = 0 ; i < IIC_CNT ; i++ ) ;
}
void m_iic_scl(byte x,boolean wx)
{
byte xx ;
/* channel A */
xx = MASCL_BIT ;
/* channel B */
if ( wx ) { xx = MBSCL_BIT ; }
/* impress */
if ( x ) { PORTC |= (1 << xx) ; }
else { PORTC &= ~(1 << xx) ; }
/* delay */
m_iic_wait();
}
void m_iic_start(boolean wx)
{
byte xx ;
byte yy ;
/* channel A */
xx = MASDA_BIT ;
/* channel B */
if ( wx ) { xx = MBSDA_BIT ; }
yy = xx+1 ;
/* both H */
PORTC |= (3 << xx) ;
/* delay */
m_iic_wait();
/* 0 -> SDA */
PORTC &= ~(1 << xx) ;
/* delay */
m_iic_wait();
/* 0 -> SCL */
PORTC &= ~(1 << yy) ;
}
void m_iic_stop(boolean wx)
{
byte xx ;
byte yy ;
/* channel A */
xx = MASDA_BIT ;
/* channel B */
if ( wx ) { xx = MBSDA_BIT ; }
yy = xx+1 ;
/* set level */
PORTC |= (1 << yy) ;
PORTC &= ~(1 << xx) ;
/* delay */
m_iic_wait();
/* 1 -> SDA */
PORTC |= (1 << xx) ;
/* delay */
m_iic_wait();
}
byte m_iic_write(byte x,boolean wx)
{
byte i ;
byte tmp ;
byte xx ;
/* send bit datum */
xx = MASDA_BIT ;
if ( wx ) { xx = MBSDA_BIT ; }
/* load raw data */
tmp = x ;
/* transfer data with write code */
for ( i = 0 ; i < 8 ; i++ ) {
/* impress datum */
PORTC &= ~(1 << xx) ;
if ( tmp & MASK80 ) { PORTC |= (1 << xx) ; }
/* 1 -> SCL */
m_iic_scl(ON,wx);
/* shift */
tmp <<= 1 ;
/* 0 -> SCL */
m_iic_scl(OFF,wx);
}
PORTC &= ~(1 << xx) ;
/* change inupt */
DDRC &= ~(1 << xx) ;
/* 1 -> SCL */
m_iic_scl(ON,wx);
/* get acknowledge */
tmp = (PINC & (1 << xx)) >> xx ;
/* 0 -> SCL */
m_iic_scl(OFF,wx);
/* change output */
DDRC |= (1 << xx) ;
return tmp ;
}
byte m_iic_read(byte x,boolean wx)
{
byte i;
byte result ;
byte xx ;
/* channel A */
xx = MASDA_BIT ;
/* channel B */
if ( wx ) { xx = MBSDA_BIT ; }
/* change inupt */
PORTC &= ~(1 << xx) ;
DDRC &= ~(1 << xx) ;
/* default */
result = 0 ;
for ( i = 0 ; i < 8 ; i++ ) {
/* shift */
result <<= 1 ;
/* 1 -> SCL */
m_iic_scl(ON,wx);
/* 0 -> SCL */
m_iic_scl(OFF,wx);
/* get bit datum */
if ( PINC & (1 << xx) ) { result |= ON ; }
}
/* change output */
DDRC |= (1 << xx) ;
if ( x ) { PORTC |= (1 << xx); }
else { PORTC &= ~(1 << xx); }
/* 1 -> SCL */
m_iic_scl(ON,wx);
/* 0 -> SCL */
m_iic_scl(OFF,wx);
return result ;
}
void get_color(boolean wx)
{
byte i ;
byte j ;
word tmp ;
byte xx[8] ;
/*
preset gain mode exposure time (each color ch)
00 = 87.5us => 0.9ms
01 = 1.4ms => 2.0ms
10 = 22.4ms => 23ms
11 = 179.2ms => 180ms
*/
i = scmd & 3 ;
if ( i == 3 ) { tmp = 180 * 4; }
if ( i == 2 ) { tmp = 23 * 4; }
if ( i < 2 ) { tmp = 2 * 4; }
/* */
j = DEVICE_ID ;
j <<= 1 ;
j &= 0xFE ;
/* initialize */
m_iic_start(wx);
m_iic_write(j,wx);
m_iic_write(CONTROL_REG,wx);
m_iic_write(0x83,wx);
m_iic_start(wx);
m_iic_write(j,wx);
m_iic_write(CONTROL_REG,wx);
/* set High or Low and exposure length */
m_iic_write(0x03,wx);
m_iic_stop(wx);
/* wait */
delay( tmp ) ;
/* read */
m_iic_start(wx);
m_iic_write(j,wx);
m_iic_write(0x03,wx);
m_iic_start(wx);
m_iic_write(j | ON,wx);
/* get */
j = 0 ;
for ( i = 0 ; i < 8 ; i++ ) {
if ( i == 7 ) { j = 1 ; }
*(xx+i) = m_iic_read(j,wx);
}
/* stop */
m_iic_stop(wx);
/* store */
for ( i = 0 ; i < 4 ; i++ ) {
j = (i << 1);
tmp = *(xx+j) ;
tmp <<= 8 ;
tmp |= *(xx+j+1) ;
*(xrgbi+i+4*wx) = tmp ;
}
}
void show_yn()
{
char msg[2];
/* delimiter */
*(msg+1) = '\0' ;
/* sensibility */
{
*(msg+0) = 'L' ;
if ( scmd & 8 ) { *(msg+0) = 'H' ; }
rs_puts( msg );
}
/* exposure length */
{
rs_putchar( '0'+(scmd & 3) );
}
/* Green */
{
*(msg+0) = 'N' ;
if ( gflag == ON ) { *(msg+0) = 'Y' ; }
rs_puts( msg );
}
/* Mask */
{
*(msg+0) = 'N' ;
if ( mflag == ON ) { *(msg+0) = 'Y' ; }
rs_puts( msg );
}
/* new line */
crlf();
}
void store_param(byte which,byte x)
{
word madr ;
/* sensibility or exposure length */
if ( which < 2 ) { madr = SCODE_ADR ; }
/* Green information */
if ( which == 2 ) { madr = SHOW_ADR ; }
/* store */
EEPROM.write(madr,x);
}
void show_color(boolean x)
{
/* only Green information */
if ( x ) {
rs_puts("AG :") ; show_value( *(xrgbi+1) );
rs_puts("BG :") ; show_value( *(xrgbi+5) );
}
else
/* all color informations */
{
rs_puts("AR :") ; show_value( *(xrgbi+0) );
rs_puts("AG :") ; show_value( *(xrgbi+1) );
rs_puts("AB :") ; show_value( *(xrgbi+2) );
rs_puts("AIR:") ; show_value( *(xrgbi+3) );
rs_puts("BR :") ; show_value( *(xrgbi+4) );
rs_puts("BG :") ; show_value( *(xrgbi+5) );
rs_puts("BB :") ; show_value( *(xrgbi+6) );
rs_puts("BIR:") ; show_value( *(xrgbi+7) );
}
crlf();
}
void setup()
{
/* initialize serial port */
Serial.begin(9600);
sindex = 0 ;
/* set initial state */
PORTB = 0x00 ;
PORTC = 0x0C ;
PORTD = 0x01 ;
/* direction */
DDRB = 0xff ;
DDRC = 0xff ;
DDRD = 0xfe ;
/* clear flags */
tflag = OFF ;
eflag = OFF ;
uflag = OFF ;
gflag = OFF ;
/* resume previous state */
xcnt = EEPROM.read(SCODE_ADR);
if ( xcnt == 0xff ) {
scmd = 11 ;
EEPROM.write(SCODE_ADR,scmd);
} else {
scmd = xcnt ;
}
xcnt = EEPROM.read(SHOW_ADR);
if ( xcnt != OFF ) { gflag = ON ; }
/* initialize variables */
xcnt = 0 ;
for ( xcnt = 0 ; xcnt < 8 ; xcnt++ ) { *(xrgbi+xcnt) = 0 ; }
state = 0 ;
/* trigger period */
MsTimer2::set(NPER,update_trigger);
/* enable */
MsTimer2::start();
}
void loop()
{
/* serial handling */
if ( uflag == ON ) {
/* clear flag */
uflag = OFF ;
/* new line */
crlf();
/* get command */
cmd = *(sbuf+0) ;
/* help */
if ( cmd == '?' ) { show_help() ; }
/* enable */
if ( cmd == 'E' ) { eflag = ON ; }
/* disable */
if ( cmd == 'I' ) { eflag = OFF ; }
/* one shot */
if ( cmd == 'C' ) {
/* get color values */
get_color(OFF);
get_color(ON);
/* show */
show_color(gflag);
}
/* write sensibility state */
if ( cmd == 'S' ) {
/* set default (selct LOW) */
scmd &= 0xf7 ;
/* set flag (HIGH or LOW) */
if ( *(sbuf+1) == '1' ) { scmd |= (1 << 3) ; }
/* store EEPROM */
store_param(0,scmd);
}
/* write exposure length */
if ( cmd == 'L' ) {
/* clear */
scmd &= 0xfc ;
/* generate code */
scmd |= ((*(sbuf+1) - '0') & 3);
/* store EEPROM */
store_param(1,scmd);
}
/* write only Green information */
if ( cmd == 'G' ) {
/* default */
gflag = OFF ;
/* judge */
if ( *(sbuf+1) == '1' ) { gflag = ON ; }
/* store */
store_param(2,gflag);
}
/* write mask */
if ( cmd == 'M' ) {
/* default */
mflag = OFF ;
/* judge */
if ( *(sbuf+1) == '1' ) { mflag = ON ; }
}
/* show status */
if ( cmd == 's' ) { show_yn(); }
}
/* timer handling */
if ( tflag == ON ) {
/* clear flag */
tflag = OFF ;
/* get color values */
get_color(state);
state++ ;
state &= ON ;
/* show */
if ( eflag == ON ) { show_color(gflag) ; }
}
}
/* receive interrupt */
void serialEvent()
{
char ch;
if ( Serial.available() > 0 ) {
/* get 1 character */
ch = Serial.read();
/* store */
*(sbuf+sindex) = ch ;
/* increment */
sindex++ ;
/* judge */
if ( ch == '\r' ) {
sindex = 0 ;
uflag = ON ;
}
}
}
Arduinoと変換基板の接続は、次のようになります。
 TeraTermを利用した、Arduinoスケッチの動作確認を
すると、以下の2チャネル分の情報を表示します。
TeraTermを利用した、Arduinoスケッチの動作確認を
すると、以下の2チャネル分の情報を表示します。
 Processingスケッチは、次頁にて説明。
Processingスケッチは、次頁にて説明。
目次 前 次