斈梡I/O憖嶌
丂ATmega僔儕乕僘偵偼丄億乕僩B丄C丄D偺斈梡I/O億乕僩偑偁傝傑偡丅 丂乮40僺儞偺ATmega644丄ATmega1280偵偼丄億乕僩A傕偁傝丅乯 丂斈梡I/O億乕僩傪埖偆偙偲偼丄DDR(Data Direction Register)丄INPUT丄OUTPUT 丂偺俁儗僕僗僞傪憖嶌偡傞偙偲偲摍壙丅 丂奺儗僕僗僞偼丄SFR(Sepecial Function Register)偲偟偰埖傢傟 丂memory mapped register偺儊儌儕嬻娫偵攝抲偝傟偰偄傑偡丅丂I/O偱埖偆偲偒偵偼丄乮乯偺拞偵偁傞傾僪儗僗傪棙梡丅 丂AVR僠僢僾偱偼丄斈梡儗僕僗僞r0偐傜r31傪丄0x00偐傜0x1f偵 丂傾僒僀儞偟偰I/O偱巊偊傞偨傔丄0x20傛傝忋偺傾僪儗僗偵 丂SFR偑儅僢僺儞僌偝傟偰偄傑偡丅 丂億乕僩B丄C丄D偺DDR丄INPUT丄OUTPUT偼丄僔儞儃儖傪巊偭偰 丂憖嶌偟偨曽偑摦嶌傪僀儊乕僕偟傗偡偄偺偱丄乽constant乿 丂儚乕僪傪棙梡偟偰掕媊丅 丂傾僪儗僗偺暲傃偼丄壓偐傜INPUT丄DDR丄OUTPUT偱偁傞偲 丂婥偑偮偗偽丄師偺傛偆偵掕媊偱偒傑偡丅 $23 constant PINB $24 constant DDRB $25 constant PORTB $26 constant PINC $27 constant DDRC $28 constant PORTC $29 constant PIND $2a constant DDRD $2b constant PORTD 丂儚乕僪傪傂偲偮偢偮僞僀僾偡傞偺偼丄柺搢側偺偱僥僉僗僩僄僨傿僞偱 丂憖嶌儚乕僪傪擖椡屻丄僋儕僢僾儃乕僪宱桼偱抂枛僜僼僩偵傛傞Paste 丂傪幚峴丅偙傟偱丄僷儔儊乕僞偍傛傃憖嶌儚乕僪偑ATmega僠僢僾偵揮憲 丂偝傟傑偡丅
丂ATmega偱偼丄DDR偵億乕僩僺儞偺擖弌椡曽岦傪愝掕偟偰偐傜 丂INPUT丄OUTPUT傪巊傢側偗傟偽側傝傑偣傫丅 丂榑棟抣偺'1'傪梌偊傞偲弌椡丄'0'傪梌偊傞偲擖椡丅 丂Arduino婎斅偱偼丄億乕僩B偺俆價僢僩栚偵LED偑愙懕偝傟偰傑偡丅
丂LED傪庤摦偱揰柵偝偣偰傒傑偡丅 丂師偺庤弴偱丄儚乕僪傪掕媊偟偰摦嶌傪妋擣偟偰偄偒傑偡丅
- 億乕僩B偺俆價僢僩栚傪弌椡偵愝掕
- 億乕僩B偺俆價僢僩栚傪榑棟抣偺'1'傪弌椡
- 億乕僩B偺俆價僢僩栚傪榑棟抣偺'0'傪弌椡
- init_led 億乕僩B偺俆價僢僩栚傪弌椡偵愝掕
- led_on 億乕僩B偺俆價僢僩栚傪榑棟抣偺'1'傪弌椡
- led_off 億乕僩B偺俆價僢僩栚傪榑棟抣偺'0'傪弌椡
 丂摦嶌偑妋擣偱偒偨側傜丄偦傟偧傟傪儚乕僪掕媊丅
: init_led DDRB c@ $20 or DDRB c! ;
: led_on PORTB c@ $20 or PORTB c! ;
: led_off PORTB c@ $df and PORTB c! ;
丂Forth偺僾儘僌儔儈儞僌偼丄價儖僩僀儞傑偨偼
丂帺暘偱掕媊偟偨儚乕僪傪慻崌傢偣傞偙偲丅
丂揰柵偲偄偆儚乕僪傪掕媊偟丄傛傝棟夝偑梕堈側撪梕偵偟偰偄偒傑偡丅
丂儚乕僪乽led_blink乿傪掕媊丅
: led_blink led_on 500 ms led_off 500 ms ;
丂儚乕僪乽led_blink乿傪奼挘偟偰丄壗偐僉乕偑
丂擖椡偝傟傞傑偱丄揰柵傪孞曉偡乽led_flush乿
丂儚乕僪傪掕媊偟傑偡丅
: led_test 1 + init_led 0 do i . led_blink loop ;
丂斀暅偵巊偆峔暥偼丄俁庬偁傝傑偡丅
begin ... again
begin ... flag until
begin ... flag while ... repeat
丂柍尷儖乕僾峔惉偲儖乕僾傪扙弌偡傞張棟偺俀庬偵
丂暘偐傟偰偄傑偡丅
丂flag until偼丄忦審惉棫偱儖乕僾傪敳偗
丂flag while ... repeat偼丄忦審惉棫偱
丂儖乕僾撪晹偺張棟傪幚峴偲側傝傑偡丅
丂儚乕僪乽led_flush乿偱偼丄僉乕擖椡偑偁傟偽
丂儖乕僾傪敳偗傞傛偆偵偟偰偄傑偡丅
丂億乕僩C偵愙懕偟偨僗僀僢僠偺榑棟抣傪億乕僩B偵偁傞
丂LED偵斀塮偝偣傞儚乕僪傪掕媊偟偰傒傑偡丅
丂摦嶌偑妋擣偱偒偨側傜丄偦傟偧傟傪儚乕僪掕媊丅
: init_led DDRB c@ $20 or DDRB c! ;
: led_on PORTB c@ $20 or PORTB c! ;
: led_off PORTB c@ $df and PORTB c! ;
丂Forth偺僾儘僌儔儈儞僌偼丄價儖僩僀儞傑偨偼
丂帺暘偱掕媊偟偨儚乕僪傪慻崌傢偣傞偙偲丅
丂揰柵偲偄偆儚乕僪傪掕媊偟丄傛傝棟夝偑梕堈側撪梕偵偟偰偄偒傑偡丅
丂儚乕僪乽led_blink乿傪掕媊丅
: led_blink led_on 500 ms led_off 500 ms ;
丂儚乕僪乽led_blink乿傪奼挘偟偰丄壗偐僉乕偑
丂擖椡偝傟傞傑偱丄揰柵傪孞曉偡乽led_flush乿
丂儚乕僪傪掕媊偟傑偡丅
: led_test 1 + init_led 0 do i . led_blink loop ;
丂斀暅偵巊偆峔暥偼丄俁庬偁傝傑偡丅
begin ... again
begin ... flag until
begin ... flag while ... repeat
丂柍尷儖乕僾峔惉偲儖乕僾傪扙弌偡傞張棟偺俀庬偵
丂暘偐傟偰偄傑偡丅
丂flag until偼丄忦審惉棫偱儖乕僾傪敳偗
丂flag while ... repeat偼丄忦審惉棫偱
丂儖乕僾撪晹偺張棟傪幚峴偲側傝傑偡丅
丂儚乕僪乽led_flush乿偱偼丄僉乕擖椡偑偁傟偽
丂儖乕僾傪敳偗傞傛偆偵偟偰偄傑偡丅
丂億乕僩C偵愙懕偟偨僗僀僢僠偺榑棟抣傪億乕僩B偵偁傞
丂LED偵斀塮偝偣傞儚乕僪傪掕媊偟偰傒傑偡丅
 丂億乕僩B丄C偺擖弌椡曽岦傪愝掕丅
DDRB c@ $ff or DDRB c!{enter}
DDRC c@ $00 and DDRC c!{enter}
丂DDRB儗僕僗僞偺抣傪庢傝弌偟偰丄16恑悢FF偲榑棟榓傪
丂媮傔傞偺偱丄僗僞僢僋偵16恑悢FF偑巆偭偰偄傑偡丅
丂偦傟傪嵞傃DDRB儗僕僗僞偺抣偲偟偰彂偒崬傒丅
丂DDRC儗僕僗僞偺抣傪庢傝弌偟偰丄16恑悢00偲榑棟愊傪
丂媮傔傞偺偱丄僗僞僢僋偵16恑悢00偑巆偭偰偄傑偡丅
丂偦傟傪嵞傃DDRC儗僕僗僞偺抣偲偟偰彂偒崬傒丅
丂儗僕僗僞偺抣傪僗僞僢僋偵揮憲偟丄壛岺偟偰偐傜
丂嵞傃儗僕僗僞偺抣偵偡傞偺偑丄I/O憖嶌偺婎杮偲
丂峫偊傑偡丅
丂億乕僩C偐傜偺擖椡偼丄PINC偱埖偄傑偡丅
丂擖椡抣傪妋擣偡傞偵偼丄埲壓偺條偵僉乕
丂傪僞僀僾偟偰傒傟偽傛偄偱偟傚偆丅
PINC c@ .{enter}
丂擖椡偟偨抣傪僗僞僢僋偵偍偒丄偦傟傪億乕僩B偵
丂揮憲偡傟偽丄巇條傪枮懌偡傞偼偢丅
PINC c@ PORTB c!{enter}
丂僗僞僢僋偑僨乕僞傪擖傟傞僶僢僼傽偺栶妱傪
丂偟偰偄傞偲傢偐傟偽丄侾峴張棟偵傑偲傑傝傑偡丅
丂惓榑棟丄晧榑棟偺崿嵼偟偨僔僗僥儉偱偼丄榑棟
丂斀揮傪捛壛偟偰懳墳丅
PINC c@ $ff xor PORTB c!{enter}
丂儌乕僞傪摦偐偡偨傔偵敿揷晅偗偟偨婎斅偑偁傝傑偡丅
丂億乕僩B丄C偺擖弌椡曽岦傪愝掕丅
DDRB c@ $ff or DDRB c!{enter}
DDRC c@ $00 and DDRC c!{enter}
丂DDRB儗僕僗僞偺抣傪庢傝弌偟偰丄16恑悢FF偲榑棟榓傪
丂媮傔傞偺偱丄僗僞僢僋偵16恑悢FF偑巆偭偰偄傑偡丅
丂偦傟傪嵞傃DDRB儗僕僗僞偺抣偲偟偰彂偒崬傒丅
丂DDRC儗僕僗僞偺抣傪庢傝弌偟偰丄16恑悢00偲榑棟愊傪
丂媮傔傞偺偱丄僗僞僢僋偵16恑悢00偑巆偭偰偄傑偡丅
丂偦傟傪嵞傃DDRC儗僕僗僞偺抣偲偟偰彂偒崬傒丅
丂儗僕僗僞偺抣傪僗僞僢僋偵揮憲偟丄壛岺偟偰偐傜
丂嵞傃儗僕僗僞偺抣偵偡傞偺偑丄I/O憖嶌偺婎杮偲
丂峫偊傑偡丅
丂億乕僩C偐傜偺擖椡偼丄PINC偱埖偄傑偡丅
丂擖椡抣傪妋擣偡傞偵偼丄埲壓偺條偵僉乕
丂傪僞僀僾偟偰傒傟偽傛偄偱偟傚偆丅
PINC c@ .{enter}
丂擖椡偟偨抣傪僗僞僢僋偵偍偒丄偦傟傪億乕僩B偵
丂揮憲偡傟偽丄巇條傪枮懌偡傞偼偢丅
PINC c@ PORTB c!{enter}
丂僗僞僢僋偑僨乕僞傪擖傟傞僶僢僼傽偺栶妱傪
丂偟偰偄傞偲傢偐傟偽丄侾峴張棟偵傑偲傑傝傑偡丅
丂惓榑棟丄晧榑棟偺崿嵼偟偨僔僗僥儉偱偼丄榑棟
丂斀揮傪捛壛偟偰懳墳丅
PINC c@ $ff xor PORTB c!{enter}
丂儌乕僞傪摦偐偡偨傔偵敿揷晅偗偟偨婎斅偑偁傝傑偡丅
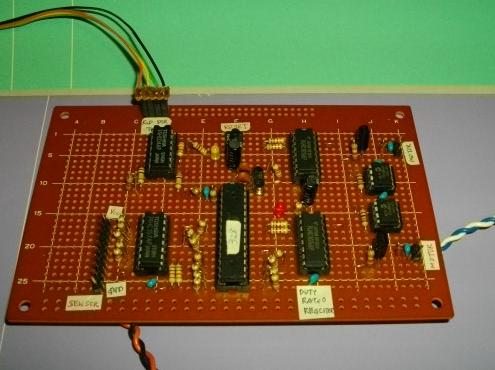 丂儅儖僠僾儘僙僢僒傪幚尰偡傞偨傔偵嶌惉偟偨婎斅丅
丂僒乕儃儌乕僞丄DC儌乕僞傪惂屼偡傞僾儘僙僢僒偵
丂PIC12F1501傪棙梡丅ATmega328偐傜PIC偵忣曬揱払
丂偡傞偨偵偼丄74HC165傪宱桼丅
丂懠偵僙儞僒乕偐傜偺係價僢僩忣曬傪擖庤偡傞偨傔
丂74HC157傪ATmega328偵愙懕丅
丂儅儖僠僾儘僙僢僒傪幚尰偡傞偨傔偵嶌惉偟偨婎斅丅
丂僒乕儃儌乕僞丄DC儌乕僞傪惂屼偡傞僾儘僙僢僒偵
丂PIC12F1501傪棙梡丅ATmega328偐傜PIC偵忣曬揱払
丂偡傞偨偵偼丄74HC165傪宱桼丅
丂懠偵僙儞僒乕偐傜偺係價僢僩忣曬傪擖庤偡傞偨傔
丂74HC157傪ATmega328偵愙懕丅
 丂奺億乕僩偺怣崋妱傝摉偰偼丄埲壓丅
PORTB
PB5 (output)LED
PB4 (output)
PB3 (output)D3
PB2 (output)D2
PB1 (output)D1
PB0 (output)D0
PORTC
PC5 (output)command(PIC)
PC4 (output)select
PC3 (input )sensor_3(sensor_7)
PC2 (input )sensor_2(sensor_6)
PC1 (input )sensor_1(sensor_5)
PC0 (input )sensor_0(sensor_4)
PORTD
PD7 (output)D7
PD6 (output)D6
PD5 (output)D5
PD4 (output)D4
PD3 (output)nLOAD_LEFT
PD2 (output)nLOAD_RIGHT
PD1 (output)TxD
PD0 (input) RxD
丂億乕僩B丄C丄D偺弶婜壔偑昁梫側偺偱儚乕僪傪掕媊丅
: init_port
$00 PORTB c! (PB value)
$f0 PORTC c! (PC value)
$0c PORTD c! (PD value)
$ff DDRB c! (PB data direction)
$f0 DDRC c! (PC data direction)
$fe DDRD c! (PD data direction)
;
丂俀庬偺僙儞僒乕偐傜丄奺係價僢僩偺僨乕僞傪庢摼偡傞偨傔
丂曄悢傪掕媊偟偰丄偦傟傜偵奿擺偡傟偽傛偄偱偟傚偆丅
variable SENSOR
variable OTHERS
: get_sensor ( -- )
PORTC c@ $e0 and PORTC c!
PINC c@ $0f and SENSOR c!
;
: get_other ( -- )
PORTC c@ $10 or PORTC c!
PINC c@ $0f and OTHERS c!
;
丂PIC偵忣曬傪搉偡偵偼丄74HC165偵僨乕僞傪搉偟偨屻
丂僩儕僈乕傪梌偊傑偡丅
丂74HC165偵侾僶僀僩傪搉偡儚乕僪傪掕媊偟偰丄偦偺
丂儚乕僪偵僩儕僈乕傪梌偊傞張棟傪捛壛偟偰偄偒傑偡丅
: put_byte (x -- )
dup
4 rshift $0f and swap
$0f and 4 lshift $f0 and
PORTD c@ $0f and or PORTD c!
PORTB c@ $f0 and or PORTB c!
;
: snd_byte (s x -- )
put_byte =0 if $fb else $f7 then
dup PORTD c@ and PORTD c!
$ff xor PORTD c@ or PORTD c!
;
: snd_trg (x1 x0 -- )
0 swap snd_byte 1 swap snd_byte ;
PORTC c@ $20 or PORTC c!
PORTC c@ $df and PORTC c!
;
丂74HC165偵俉價僢僩僨乕僞傪揮憲偡傞偲偒偵丄nLOAD僺儞偵
丂晧僷儖僗傪梌偊傑偡丅偙偆偄偆偲偒偼丄侾價僢僩偺榑棟抣
丂巜掕偑偱偒傞偲曋棙丅
丂Forth偱偼丄乽柍偄傕偺偼嶌傞乿偲偄偆巚憐側偺偱丄尦掲傔
丂偲側傞儚乕僪傪掕媊偟丄摦嶌傪巜掕偡傞僷儔儊乕僞傪搉偡
丂曽恓偱丄僩儕僈乕梡儚乕僪傪彂偄偰傒傑偡丅
: pdo.set 1 swap lshift PORTD c@ or PORTD c! ;
: pdo.clr 1 swap lshift $ff xor PORTD c@ and PORTD c! ;
: snd_htrg 3 pdo.clr 3 pdo.set ;
: snd_ltrg 2 pdo.clr 2 pdo.set ;
丂儚乕僪悢偼憹偊傑偡偑丄柤徧偱壗傪偡傞偺偐敾撉偟傗偡偔側傝傑偡丅
丂億乕僩C偱偼丄價僢僩係丄俆偱榑棟抣傪弌椡偡傞憖嶌偑
丂昁梫側偺偱丄億乕僩C偺奺價僢僩傪憖嶌偡傞斈梡儚乕僪
丂傪掕媊偟丄偦傟傪巊偆儔僢僷乕儚乕僪傪彂偄偰傒傑偡丅
: pco.set 1 swap lshift PORTC c@ or PORTC c! ;
: pco.clr 1 swap lshift $ff xor PORTC c@ and PORTC c! ;
: snd_ptrg 4 pco.set 4 pco.clr ;
: sel_a 5 pco.clr ;
: sel_b 5 pco.set ;
丂儚乕僪偺掕媊偺拞偵丄懠偺儚乕僪傪巜掕偡傞偙偲偱
丂傛傝傢偐傝傗偡偔偱偒傑偡丅
丂婛懚偺儚乕僪傪棙梡偟偰丄傛傝摿壔偟偨婡擻傪傕偮
丂儚乕僪傪掕媊偟偰丄僔僗僥儉傪巊偄傗偡偔偱偒傞偲
丂側傞偲丄儚乕僪掕媊丄懄幚峴偺摿挜偑妶偒偰偒傑偡丅
丂奺億乕僩偺怣崋妱傝摉偰偼丄埲壓丅
PORTB
PB5 (output)LED
PB4 (output)
PB3 (output)D3
PB2 (output)D2
PB1 (output)D1
PB0 (output)D0
PORTC
PC5 (output)command(PIC)
PC4 (output)select
PC3 (input )sensor_3(sensor_7)
PC2 (input )sensor_2(sensor_6)
PC1 (input )sensor_1(sensor_5)
PC0 (input )sensor_0(sensor_4)
PORTD
PD7 (output)D7
PD6 (output)D6
PD5 (output)D5
PD4 (output)D4
PD3 (output)nLOAD_LEFT
PD2 (output)nLOAD_RIGHT
PD1 (output)TxD
PD0 (input) RxD
丂億乕僩B丄C丄D偺弶婜壔偑昁梫側偺偱儚乕僪傪掕媊丅
: init_port
$00 PORTB c! (PB value)
$f0 PORTC c! (PC value)
$0c PORTD c! (PD value)
$ff DDRB c! (PB data direction)
$f0 DDRC c! (PC data direction)
$fe DDRD c! (PD data direction)
;
丂俀庬偺僙儞僒乕偐傜丄奺係價僢僩偺僨乕僞傪庢摼偡傞偨傔
丂曄悢傪掕媊偟偰丄偦傟傜偵奿擺偡傟偽傛偄偱偟傚偆丅
variable SENSOR
variable OTHERS
: get_sensor ( -- )
PORTC c@ $e0 and PORTC c!
PINC c@ $0f and SENSOR c!
;
: get_other ( -- )
PORTC c@ $10 or PORTC c!
PINC c@ $0f and OTHERS c!
;
丂PIC偵忣曬傪搉偡偵偼丄74HC165偵僨乕僞傪搉偟偨屻
丂僩儕僈乕傪梌偊傑偡丅
丂74HC165偵侾僶僀僩傪搉偡儚乕僪傪掕媊偟偰丄偦偺
丂儚乕僪偵僩儕僈乕傪梌偊傞張棟傪捛壛偟偰偄偒傑偡丅
: put_byte (x -- )
dup
4 rshift $0f and swap
$0f and 4 lshift $f0 and
PORTD c@ $0f and or PORTD c!
PORTB c@ $f0 and or PORTB c!
;
: snd_byte (s x -- )
put_byte =0 if $fb else $f7 then
dup PORTD c@ and PORTD c!
$ff xor PORTD c@ or PORTD c!
;
: snd_trg (x1 x0 -- )
0 swap snd_byte 1 swap snd_byte ;
PORTC c@ $20 or PORTC c!
PORTC c@ $df and PORTC c!
;
丂74HC165偵俉價僢僩僨乕僞傪揮憲偡傞偲偒偵丄nLOAD僺儞偵
丂晧僷儖僗傪梌偊傑偡丅偙偆偄偆偲偒偼丄侾價僢僩偺榑棟抣
丂巜掕偑偱偒傞偲曋棙丅
丂Forth偱偼丄乽柍偄傕偺偼嶌傞乿偲偄偆巚憐側偺偱丄尦掲傔
丂偲側傞儚乕僪傪掕媊偟丄摦嶌傪巜掕偡傞僷儔儊乕僞傪搉偡
丂曽恓偱丄僩儕僈乕梡儚乕僪傪彂偄偰傒傑偡丅
: pdo.set 1 swap lshift PORTD c@ or PORTD c! ;
: pdo.clr 1 swap lshift $ff xor PORTD c@ and PORTD c! ;
: snd_htrg 3 pdo.clr 3 pdo.set ;
: snd_ltrg 2 pdo.clr 2 pdo.set ;
丂儚乕僪悢偼憹偊傑偡偑丄柤徧偱壗傪偡傞偺偐敾撉偟傗偡偔側傝傑偡丅
丂億乕僩C偱偼丄價僢僩係丄俆偱榑棟抣傪弌椡偡傞憖嶌偑
丂昁梫側偺偱丄億乕僩C偺奺價僢僩傪憖嶌偡傞斈梡儚乕僪
丂傪掕媊偟丄偦傟傪巊偆儔僢僷乕儚乕僪傪彂偄偰傒傑偡丅
: pco.set 1 swap lshift PORTC c@ or PORTC c! ;
: pco.clr 1 swap lshift $ff xor PORTC c@ and PORTC c! ;
: snd_ptrg 4 pco.set 4 pco.clr ;
: sel_a 5 pco.clr ;
: sel_b 5 pco.set ;
丂儚乕僪偺掕媊偺拞偵丄懠偺儚乕僪傪巜掕偡傞偙偲偱
丂傛傝傢偐傝傗偡偔偱偒傑偡丅
丂婛懚偺儚乕僪傪棙梡偟偰丄傛傝摿壔偟偨婡擻傪傕偮
丂儚乕僪傪掕媊偟偰丄僔僗僥儉傪巊偄傗偡偔偱偒傞偲
丂側傞偲丄儚乕僪掕媊丄懄幚峴偺摿挜偑妶偒偰偒傑偡丅
栚師 慜 師